HOME > 第11回受賞ロボット
「第11回 ロボット大賞」受賞一覧
経済産業大臣賞
- 世界最小の大型加工機 高精度本格加工ロボット M-800
[ファナック株式会社]

概要
従来の加工機では困難だった高精度な加工を実現する高精度6軸多関節ロボット。60kgの可搬重量ながら、大きな加工反力に耐える高剛性アームを搭載し、高い軌跡精度を実現。高精度キャリブレーション技術により、アーム誤差を補正し、±0.1mm以下の絶対精度を達成。高精度なレーザ切断やウォータジェット加工に加え、加工反力を受けても高い精度を維持できるため、切削加工、面加工、穴あけなどの本格加工が可能。小さい設置面積で広い動作範囲を持ち、様々な方向からの加工ができるため、経済的かつコンパクトな設備を提供する。自動車や航空機の部品加工に適用が進んでおり、厳しい環境下でも長期間の安定稼働を実現している。
評価のポイント
世界でもトップクラスの技術で実現された高剛性、極めて高い絶対位置精度、大きな加工反力を受けながら高い精度での動作が可能という特徴を有している。これまでのロボットでは不可能であった様々な加工作業を可能とし、自動車産業、航空機産業等での利用が始まっている。その省スペース効果、低コスト化は絶大であり、今後益々の利用が見込まれると共に、本ロボットで導入された技術の横展開も大いに期待できる。
総務大臣賞
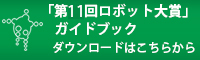
- カチャカ
[株式会社Preferred Robotics]
概要
自律移動機能を備えた搬送ロボットシステム。専用の棚とドッキングし、自在に物品を移動できるプラットフォームとして設計されている。小型ながら、高度なナビゲーション、自己位置推定、音声認識機能を実装し、スマートフォンやクラウド経由で操作可能。家庭内では、配膳、子どもの身支度、ゴミ捨てなどを自動化し、業務用ではクリニックや工場での効率化を実現。2018年のCEATECで発表された「全自動お片付けロボットシステム」が原点であり、設計変更を重ね、低価格で高性能を実現した。家庭内外での革新性が評価され、様々な業種での活用が広がっている。
評価のポイント
自社の強みを活かす戦略的アプローチをとった製品開発とマーケット開拓を巧みに行っており、創業してまだ2年弱でありながら実績もあがってきている。明確にロボットと呼べる製品事業で技術力もしっかりしているだけではなく、製品や事業戦略にフィットしたターゲット市場を発掘できており、こうした評価を裏付けるように一定の規模の資金調達にも成功。AI機能の組込みによる高度な自律移動や人とロボットの円滑なコミュニケーションの実現等、ソフトウェアおよびクラウドやスマートフォン等も活用したソフト・ハードのインテグレーションに関しても高い技術を有しており、高度ICT基盤技術との連携、ICT利活用という観点からも評価できる。
文部科学大臣賞
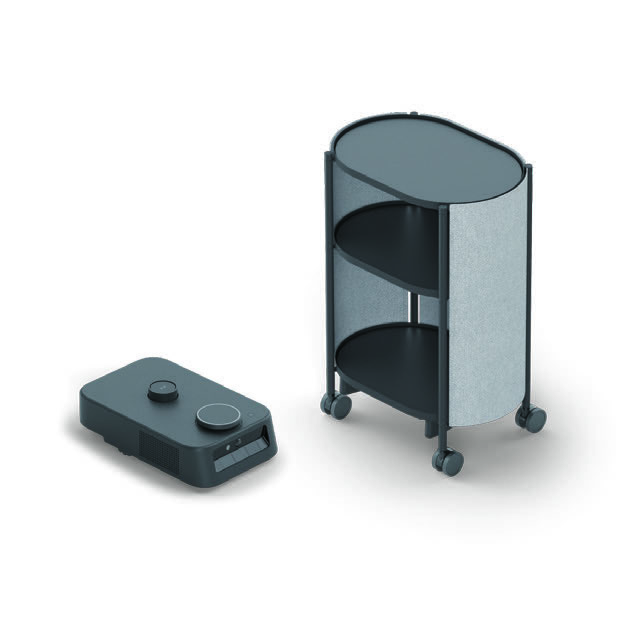
- 超小型月面探査ローバLEV-1&LEV-2
[国立研究開発法人宇宙航空研究開発機構/中央大学 /国立大学法人東京農工大学/ 同志社大学/株式会社タカラトミー /ソニーグループ株式会社]
概要
日本初の月着陸機SLIMに搭載された超小型月面探査ローバ(LEV)が、月面で連携してミッションを遂行した。LEVシステムはLEV-Mと2台のローバ(LEV-1とLEV-2)で構成され、2024年1月、SLIM探査機の着陸直前にLEV-1とLEV-2が独立して月面に展開された。LEV-1は単一の車輪で方位制御や跳躍移動を行い、環境状態の観測を実施。LEV-2はSLIM探査機を発見し、その画像を撮影してLEV-1に送信しながら周囲を走査した。LEV-1はデータを地球へ直接送信する能力を持ち、LEV-1は世界初の跳躍移動型ロボット、LEV-2は世界最小・最軽量(質量228g)の月面探査ロボットとして、完全自律でのロボット間通信・地球へのデータ送信に成功した。
評価のポイント
人類の活動領域拡大に向け、月惑星探査のニーズが高まっているなかで、今回の月面探査ミッションでは、月面での自律変形・移動(跳躍)、LEV-1などの自律撮影・地球への画像送信が達成された。 また、今後、宇宙開発、月惑星探査は、民間での技術開発も期待されるなかで、小型化・コストダウンを実現した。これらの成果は、今後の月面探索につながる成果であるとともに、今後の宇宙開発、ひいては科学技術の発展に大きなインパクトを与えるものである。
農林水産大臣賞
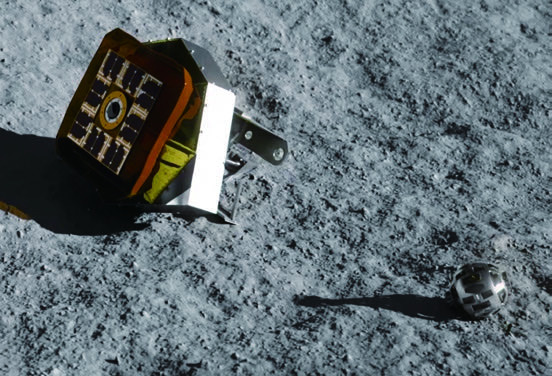
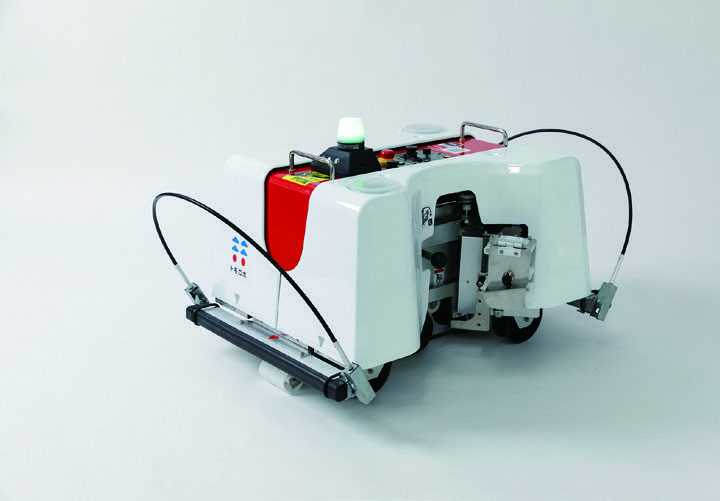
- 水田に浮かべる自動抑草ロボット「アイガモロボ」
[株式会社NEWGREEN]
概要
化石燃料や化学農薬、人の手を使わずに自動で走行する水田抑草ロボット。農研機構との実証実験では、収量が1割増加し、除草工数が6割削減された。特に有機農業に取り組む農業者からの期待が高く、2023年には、500台を製造・販売した(完売)。また、G7農業大臣会合で展示された他、中国やベトナムでの実証実験が開始されるなど、国内外から注目を集めている。さらに、今後10年間で数万台の販売を計画している。
評価のポイント
世界初の自動水田抑草ロボットを実用化した。全国の有機農業者等からの要望を受け、2023年には限定500台を完売した実績があり、全国広範囲に導入実績がある。国内の販売と同時に、中国、ベトナム、フィリピン、カナダなどからも要望を受け、現在各国で実証実験を開始している。また、改良を加えた安価版も既に開発済みで、来年発売予定であるという点から、将来性も高く評価できる。なお、ロボットの販売と同時に、生産された有機米を買い取るというビジネスモデルも展開し、実績を出している。
国土交通大臣賞
- 鉄筋結束ロボット「トモロボ」
[建ロボテック株式会社]
概要
建設生産での主要部材となっている“鉄筋コンクリート”の中で補強材として格子状に並べられている鉄筋の交点を針金で緊結し固定する作業を人の代わりに行う人協働ロボット。鉄筋結束作業は、結束数が非常に多く(一人あたり6000〜8500箇所)、腰を曲げた状態で長時間作業を行う必要がある過酷作業だが、市販の手持ち電動工具をセットするだけで、鉄筋工事における単純作業である結束作業を自動化が可能となる。
評価のポイント
簡単な機構で、軽量かつ安価で効率よく、自動的に移動しながら鉄筋を効率的に結束することができる、ユーザーにとって非常に使いやすい鉄筋結束ロボット。技術的工夫については国内外の特許も取得し、販売・レンタルの事業で、多くの現場での導入実績もある。鉄筋結束作業における身体的な負荷の軽減に貢献し、建設現場における労働力不足に対し、省人化・生産性向上を実現するロボットであるという点で、社会的なインパクトは大きい。
中小企業庁長官賞(中小・ベンチャー企業賞)
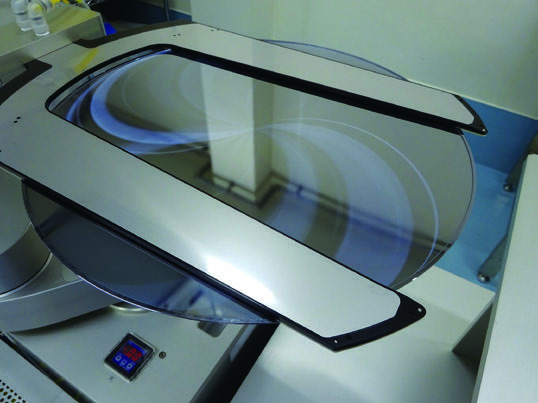
- KUMADE-FORK(ECシリーズ)
[株式会社ハーモテック]
概要
ベルヌーイ方式やエジェクターを複合的に利用し、広範囲に負圧を発生させることで、脆弱な極薄ウェハを優しく搬送する技術。特にパワーデバイス製造分野で高く評価され、大手企業にも採用されている。
新型ECシリーズは、ウェハの反りや撓みを考慮して非接触搬送が可能。カーボンニュートラルや脱炭素社会の実現に向けて、次世代パワー半導体の製造に対応し、消耗部品がなくランニングコストがかからない。さらに、半導体産業以外の分野への応用も視野に入れている。食品業界などでも、脆弱な製品の傷つけない搬送が実証されており、今後の自動化分野での利用が期待される。
新型ECシリーズは、ウェハの反りや撓みを考慮して非接触搬送が可能。カーボンニュートラルや脱炭素社会の実現に向けて、次世代パワー半導体の製造に対応し、消耗部品がなくランニングコストがかからない。さらに、半導体産業以外の分野への応用も視野に入れている。食品業界などでも、脆弱な製品の傷つけない搬送が実証されており、今後の自動化分野での利用が期待される。
評価のポイント
これまで搬送が難しかった薄く大型のウェハを、接触せずに吸引固定し、さらに裏返すことができる技術は他に例を見ない技術。国の流通特許事業で、使われていなかった特許を引き受け、実用化した。半導体製造は、AI等の半導体チップのニーズから今後の市場拡大の期待が大きい。応募者独自の技術であり、また、産業分野としても今後に大きく波及効果の高い技術である。
日本機械工業連合会会長賞
- つくばチャレンジ
[つくばチャレンジ実行委員会]

概要
2007年から毎年開催される移動ロボットの自律走行技術を実環境で試す公開実験。つくば市内のコースを設定し、距離や課題を年々ブラッシュアップし、2013年から探索対象の発見、2018年からは前日に通知されるチェックポイント通過、2023年からは荷物配送の課題も加わった。大学や企業などから多くのチームが参加し、市街地での自律走行技術の向上に寄与している。一般市民の理解を深めるための活動も行われ、技術の進展とともに社会的意義が評価されている。
評価のポイント
公開実験の場を提供することで、先端技術の実装と検証が繰り返され、参加者の技術は年々向上し、その過程で、実環境における自律走行技術全体の発展に大きく貢献している。また、参加者の増加が、参加費収入と広告効果によるスポンサー収入の増収につながり、持続可能な運営体制を実現した。ビジネス・社会実装、人材育成双方の取り組み、市民へのロボット技術啓発という観点から評価は高い。
日本機械工業連合会会長賞
- 自律走行搬送ロボット 「ラピュタPA-AMR」
[ラピュタロボティクス株式会社]

概要
物流倉庫でのピッキング作業を支援する協働型ピッキングアシストロボット。人が商品を棚からピッキングし、ロボットが次の作業ポイントに移動することで、作業効率を向上させる。スタッフ一人当たり2~3台のロボットが協働し、倉庫管理システム(WMS)と連携したクラウドロボティクスプラットフォームにより最適なピッキングルートを自動算出する。ロボットの群制御機能により、多種多様なロボットとの連携が可能である。また、現場での安全性も高く、導入コストも抑えられる。物流業界における人材不足や作業効率の課題解決に貢献している。
評価のポイント
完全自動化ではなく、商品の運搬はロボットが行い、ピッキングは近くにいる人が行うことで、人間共存で作業の効率化を低コストに実現するシステムを構築する提案は、顧客のニーズにマッチしたシステムである。米国の競合企業に対して日本の狭い倉庫の通路での細やかな動きを実現している点、また、自社でロボットの開発、設計から全体の動作管理システムの構築まで行っている点で、技術的な優位性を持っている。動作データの収集分析結果から、ユーザー企業への改善提案をして作業効率向上に貢献しているなど、ICT利活用分野の優れた事例である。
優秀賞(介護・医療・健康分野)
- スマーター・インクルーシブ・ダンス
【東北大学/国立長寿医療研究センター/パラマウントベッド株式会社/株式会社Shiori】

概要
障がいの有無や種類・程度を問わず、全員が共にダンスを楽しむためのプロジェクト。技術面ではユーザーの体に装着した部位の傾きを検知する慣性センサや装着型モーションキャプチャシステムと、それらと介護ロボットをつなぐネットワークシステムが特徴。ユーザは体でロボットを動かすことができるため、ジョイスティックなどの操作デバイスを動かす必要がなくなり、両手を使ったより表現力豊かなダンスを踊ることができるようになる。
評価のポイント
世代や障害の有無を問わず、すべての人々が社会に積極的に参加できる高い包摂性を持つ社会の実現を目指しており、その社会的ニーズは極めて高い。市販の福祉介護機器を活用し、特別なチューニングを必要としないシステムはユーザビリティも高く、多くの人々に利用しやすい点が評価される。特に、VR環境や触覚提示技術を用いた視覚障害者への配慮は先進的であり、ダンスを通じた感情表現や社会参加の促進は、リハビリテーションや認知症予防にも寄与する可能性が期待される。
優秀賞(社会インフラ・災害対応・消防分野)
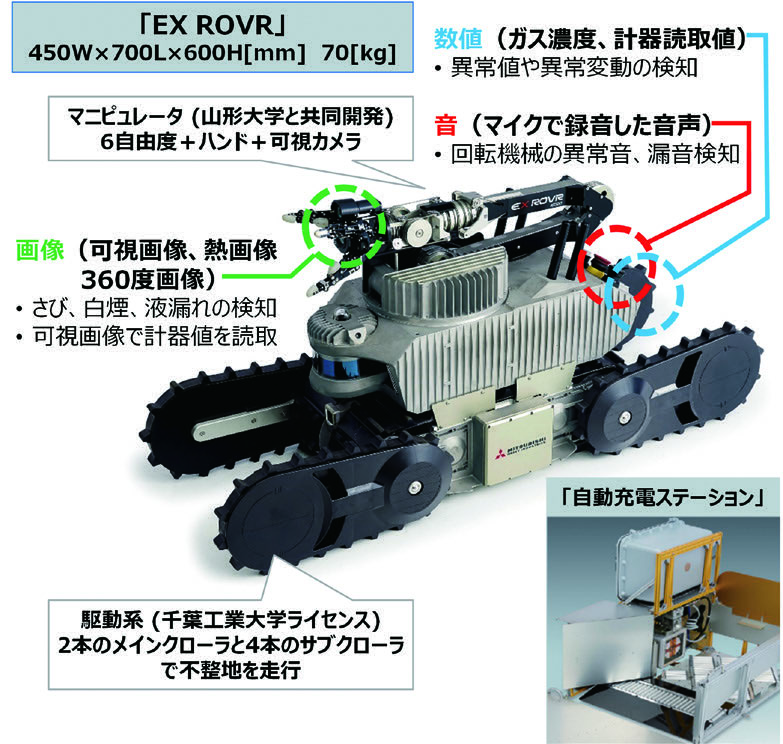
- プラント自動巡回点検防爆ロボット「EX ROVR」(エクスローバー)
[三菱重工業株式会社/ENEOS株式会社/学校法人千葉工業大学/国立大学法人山形大学/ 国立大学法人東北大学]
概要
引火性ガスのある危険場所で昼夜問わず自律巡回点検を行うロボット。可視画像、熱画像、ガス濃度、温度、音などの情報を収集し、LTE通信を介してクラウドに格納、AIで異常を検知・通知する。日米欧で防爆認証を取得し、70kgの軽量・コンパクト設計、クローラ駆動による高い走破性、6自由度のマニピュレータを備える。2022年4月に発売し、石油ガス化学業界の人手不足や安全性向上に貢献し、海上プラントの省人化・無人化に期待されている。
評価のポイント
日本国内唯一の使用可能な防爆移動ロボット。日米欧で法規認証された防爆性能(自らが引火源とならない性能)を持ち、軽量、コンパクト、クローラ駆動系による高い走破性、自由度の高いマニピュレータ、ロボット本体と同じ防爆性能を有する充電ステーションと組み合わせた稼働率の高さを兼ね備えた。また、メインターゲットとする石油ガス化学業界の海上プラットフォーム型石油掘削施設は、省人化・無人化が求められ、今後の発展が期待される。
優秀賞(農林水産業・食品産業分野)
- 無人ロボットコンバイン
[株式会社クボタ]

概要
稲や麦の収穫作業を自動で行う業界初の無人ロボットコンバイン。2024年1月に販売を開始し、有人監視下での無人走行に分類される。先進技術と制御技術を駆使し、圃場形状マップの自動作成や走行ルート設定、タンク満杯時に排出位置への自動移動などの機能を備える。また、農業の担い手の高齢化や人手不足に対応し、効率的な農作業を可能にすることで、農業経営の基盤強化と食料安全保障への貢献が期待できる。
評価のポイント
これまで技術的難度が高いとされてきたロボットコンバインの無人化を実現した。コンバインは、特に安全性の確保に課題があり、有人監視下での無人走行は困難であったが、AIによる人の検出技術等、先端技術と制御技術により、これらの課題を克服し、業界で初めて量産に成功した。また、人が行っている作業方法を制御技術によって再現し、熟練オペレータ同等の高い作業能率を実現している。さらに、水田の主要3機種(トラクタ、田植機、コンバイン)の無人ロボットが出揃ったことで、無人ロボット農機による一貫作業体系が可能となり、農業がより効率的で持続可能になることが期待される。
優秀賞(ビジネス・社会実装部門)
- 社会インフラサービスを支える業務DXロボットugo(ユーゴー)
[ugo株式会社]

概要
オフィスビルや商業施設の警備用途、メーター点検を行うロボット。「ugo Pro」「ugo Ex」「ugo mini」の3モデルが提供されている。「ugo Pro」は2本のアームと表情豊かな顔ディスプレイを持ち、エレベーター操作によるフロア移動に優れた機能を持つ。「ugo Ex」はカスタマイズ可能で、多様なセンサーやカメラを追加できる。「ugo mini」はコンパクトで機動性が高く、狭い空間での点検作業に適している。また、ロボットアームを活用したエレベーターのボタン操作やAIを用いた障害物チェック機能を備え、安全性と信頼性を高めている。
評価のポイント
アナログ計器の読み取りなどの機能を備え、既存設備の変更することなく従来の人間の業務を確実に代替している。ハードウェア、ソフトウェア、運用プラットフォームを自社で一貫して開発し、ユーザのニーズに応じたソリューションを提供する点で独自性がある。出荷開始から3年弱で累計出荷台数は200台を超え、2023年にはマーケットシェア1位(54%)を獲得。今後は介護現場や医療施設、通信基地局やデータセンターなどでの活用が期待されており、国内外でのさらなる展開も計画されている。
優秀賞(ビジネス・社会実装部門)
- 体をひねって姿勢の自由を提供するロボット車椅子「Hineru」(ハイネル)
[株式会社コボリン]

概要
重度身体障害者のために開発された自分で姿勢を変えられない人々のための車椅子。リクライニングやティルト、足台エレベーション機能に加え、体幹のひねりや引き上げ動作を可能にし、「車いすを身体に合わせた」姿勢を実現する。姿勢の記録と再現が簡単に行え、寝たきりの不快を解消する効果が期待される。また、高齢者や半身不随の方にも有効であり、筋力維持や血液循環促進などの身体的効果や、孤独感の低下などの心理的効果が期待されている。
評価のポイント
ロボット技術を活用することにより、身体のズレを発生させない機構を設けたうえで、側屈、回旋、伸展の姿勢変換を人手に頼らず、自ら操作することができる点に先進性がある。利用者が必要とするタイミングで安楽姿勢に変換し、その状態を保持することができ、身体拘縮の予防をはじめ、呼吸や嚥下のしやすい姿勢をとることも可能となる。これまで介助者に依存していた姿勢変換を利用者は気兼ねなく、さらには就労や就学の場面など、長時間の車いす利用の苦痛も大幅に軽減する。
優秀賞(要素技術部門)
- 近接覚センサー TK-01
[株式会社Thinker]

概要
赤外光反射式の小型近接覚センサーで、高速手探り動作を実現するためのセンサーである。このセンサーは、対象物からの反射光量を高速処理し、1.5~20mmの近距離計測および傾き角度の計測が可能である。ロボットの指先に搭載することで、対象物の配置誤差や環境変化に対応でき、透明物体や鏡面物体も高精度に計測できる。また、非接触・接触センサとしての応用も可能で、高速手探り動作により作業効率と精度を向上させる。これにより、特にFA分野や食品産業などでの自動化ニーズに対応できる。
評価のポイント
カメラを使ってもロボットが苦手な作業(イレギュラー、不定形物、バラ積み)の自動化し、高価で処理が遅い3Dビジョンセンサーを使わず、本近接覚センサーによって安価に実現した。器用で高速のピッキングが実現できるという点で優位性があり、他のセンサーや柔軟指などとの組み合わせにより、幅広い応用が期待できる。2×2の赤外線発光・受光素子を用い、赤外線反射強度の空間的パターンの特徴量抽出をAI(機械学習)によってハンドリングする対象物の位置・姿勢を計測できる点が最大の強みである。社会的ニーズは明確であり、先進性・独自性・競争力のある技術である。
審査員特別賞
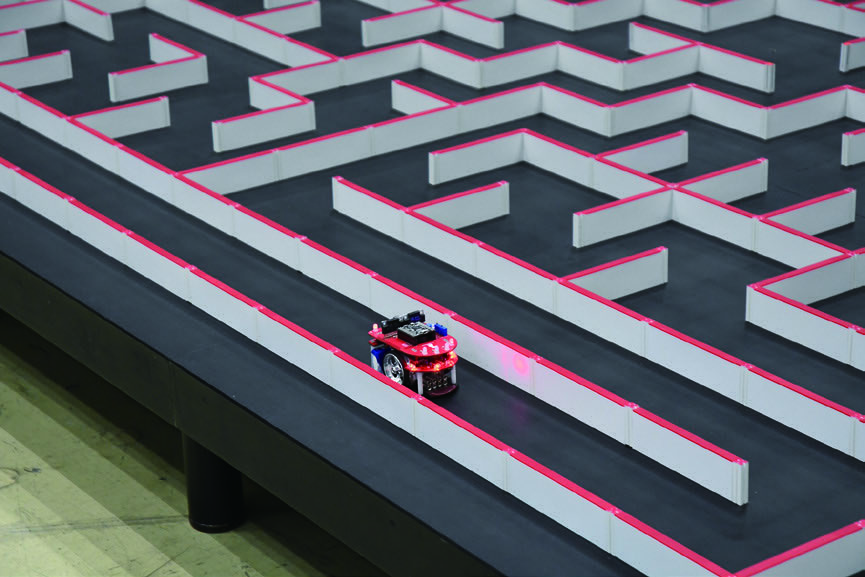
- マイクロマウス
【公益財団法人ニューテクノロジー振興財団】
概要
参加者が自作した自立型ロボットを用いて迷路を自律的に探索し、最短時間でゴールに到達する競技。この競技は1977年にIEEE(米国電気電子学会)が提唱し、日本では1980年から「全日本マイクロマウス大会」として毎年開催され、現在は事実上の世界大会となっている。競技には自律操縦の速さを競うロボトレース競技もあり、学生から高度な技術を持つロボットまで多様な参加者が集う。競技を通じて参加者はAIやロボット工学の実践的な技術を磨き、国際的な技術交流や情報交換の場としても機能している。また、技術教育の場として若い世代の育成に貢献する。
評価のポイント
長期に渡る継続開催のための優れたコンセプトを有し、それが多くの参加者を集めること、参加者が競技を通して総合的なエンジニアリングスキルを身につけることにつながっている。大会としても十分な実績を有し、コミュニティ形成等の観点からも評価できる。学生でマイクロマウスに興味を持った方々が、社会でエンジニアとなり活躍されている例は数多く、人材育成という観点で評価する。