遠隔操縦用建設ロボット
[国土交通省九州地方整備局九州技術事務所 株式会社フジタ]

概要
本ロボットは平成18年6月沖縄県中城村で発生した大規模な土砂災害現場に導入され、二次災害の発生及び被害の拡大防止などに貢献した。自然災害復旧で活躍する既存の無線操縦専用機械は特殊であり、台数も少なく大型であるため、緊急時の機動性に課題があった。こうした課題を早急に打開することを目的として開発された本ロボットは、運搬が容易であり、現地にある汎用の建設機械に搭載することで無線操縦が可能。一刻を争う災害復旧への早期対応を実現した。
評価のポイント
求められる土砂災害への迅速な対応と適用分野の拡大
一般に火山の噴火をはじめ地震や豪雨に起因する土砂災害等 は、その発生を予測すること、あるいは、前以って被災の拡がりを 特定することは甚だ困難である。 例えば、2004年10月に発生した新潟県中越地震の大災害な どは至近の例である。全国には土砂災害危険箇所が潜在する。そ の防災対策上の深 刻さを真摯に受け 止める必要がある。 本ロボットは災害復 旧への安全で迅速 な対応、土木工事 における危険作業 への対応を可能に した。 今後、オペレータ の健康上の問題が 考えられる廃棄物 処分場における作 業や汚染土壌の除 去作業、火災の延焼防止作業さらには地雷の撤去作業などへの適用が可能な技術 である。 このように適用分野が拡大されることによって、社会に多大な貢 献をもたらすと考えられ、社会的必要性は計り知れない。
導入実績 : 別府朝見川、四国四万十川河口、延岡五ヶ瀬川、 桜島野尻川、沖縄中城村、灰塚ダムトンネル等
販売実績 : 四国2台・福岡4台・鹿児島2台・広島1台
運搬・組立の簡便性と高い操作精度を実現/高い搭載汎用性とより確実な安全性と安定性の確保
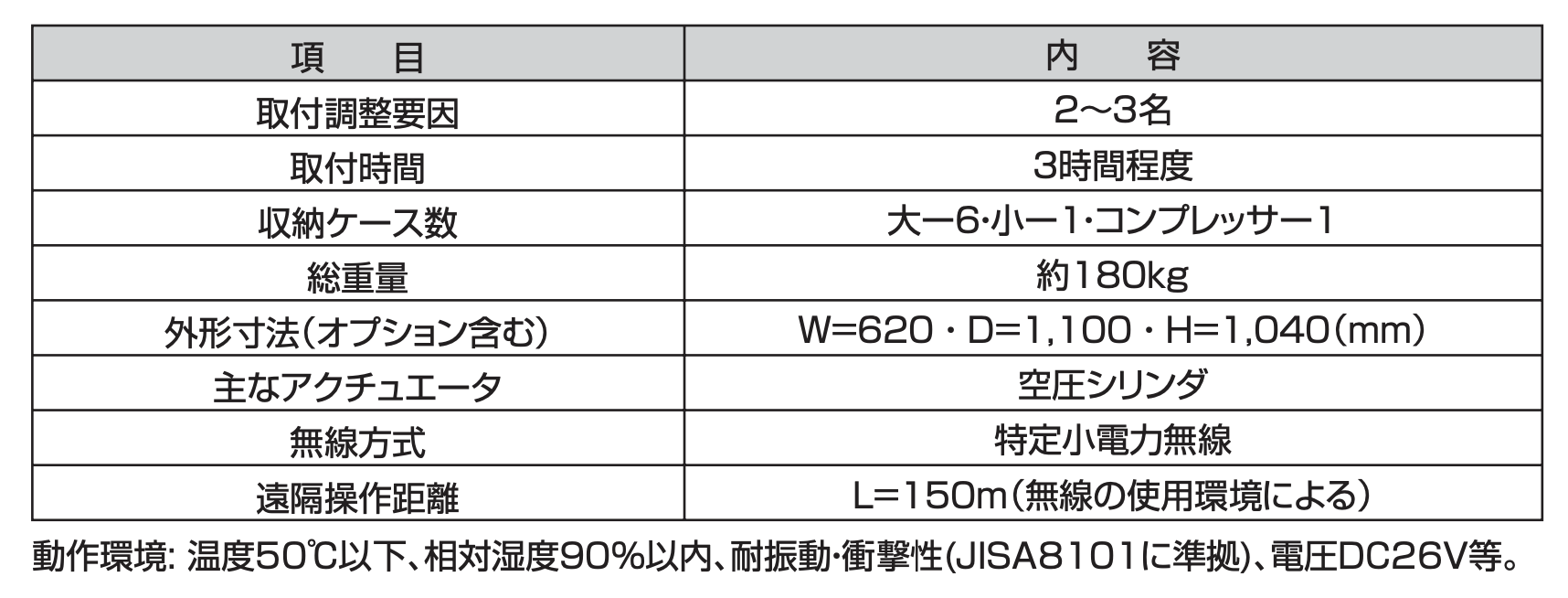
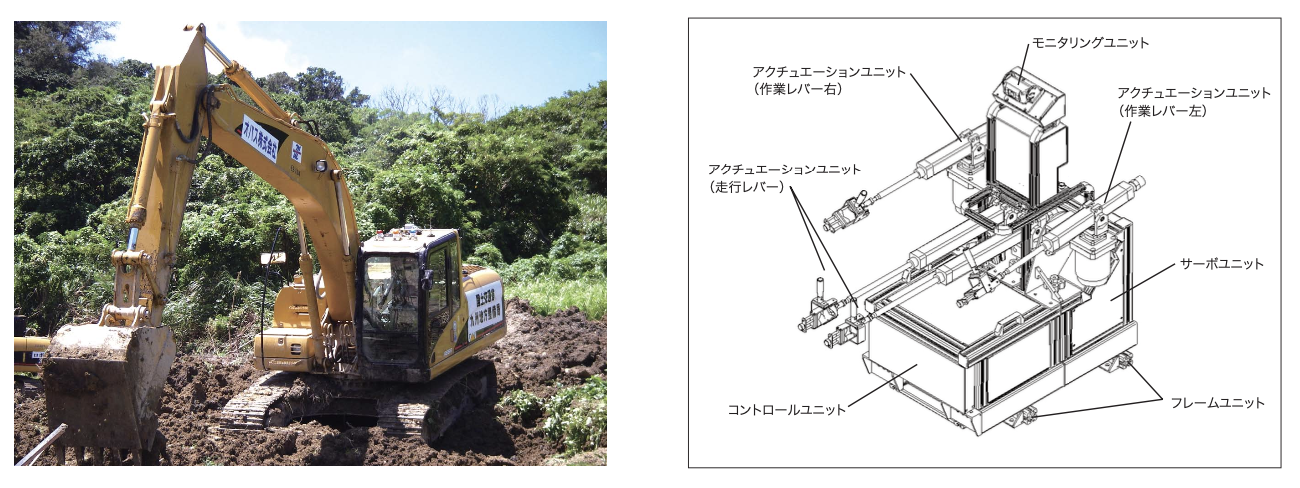
本ロボットは、土砂災害に関する情報を収集し、災害復旧におけ る建設機械の役割, 建設機械に必要とされる機能, 現状での問題点 を踏まえ、ユーザーの立場から下記のコンセプトにより開発されて いる点で魅力的である。 (1)実用性(可搬性) :緊急時を想定し、手軽に人力で運搬ができる。 たとえ、多少の距離を移動する場合でも輸送に何らの不都合を伴 わない(10のユニット分割) (2)実用性(装着性) :ロボットを構成するユニットの取り扱いが簡潔 で, 確実にシステムを組み立てることができる (組み立てに3時間 程度) また、特別な技能を必要とせず、維持管理が容易である。 (3)実用性・経済性・デザイン性(操作性) :違和感の無い操作感覚を 有し、操作精度および安全性に優れている(土工事施工精度は 51.6~95.3mm) 災害復旧実績(コスト;専用機の13%減、効率; 有人運転の65.5% 専用機と同等) (4)利便性(適用性) : 汎用の油圧ショベル の操作機能に合致 し、機種を選ばない。
既往の類似例では、油圧ショベル本体の事前の改造を必要とし、遠 隔操縦はその改造した機械に限定される。この部分においては、 特殊な遠隔操縦専用機となんら変わらない。その点、本ロボットは 全国の市販されている殆どの油圧ショベルに搭載が可能であるた め汎用性が高く、基本的なコンセプトに大きな違いがある。
①位置決め精度確認②制御性能③着脱④作業性確認⑤操作性の 確認(未経験操作者が6時間程度で習熟する)の試験を行い、安全 で十分な制御性能を有する結果を確認した。(非常停止装置を装 備)また、遠隔操縦距離による作業性を確認する必要があり、⑥性 能評価試験として、掘削・旋回・積込の作業を行った。性能評価時 に重要性が明らかとなった視覚情報の機能を追加した。耐久性で は⑦走行⑧振動・衝撃の試験を行い、十分な強度を確認した。

迅速な機動性を求められた災害現場/
一旦災害が発生すれば, 人命救助, 経済的損失を防止するため緊 急出動を行い, 迅速な災害復旧を開始しなければならない。 しかし、1997年(平成9年)北海道豊浜トンネルの崩落事故な どにおいて、遠隔操縦専用機械の出動は期待されたものの、台数 の制約から緊急性が高いにも関わらず、遠方からの輸送に要する 時間、遅延時の効果からも導入が断念された。 以上のように既存の遠隔操縦専用機械は特殊であり、緊急時の 機動性に深刻な問題を残していた。
こうした諸課題を早急に打開して、一刻を争う災害復旧・防災, 危 険な作業などにおいて、迅速な対応をするため, 汎用機械に装着す ることで遠隔操縦を可能にする建設ロボットの開発と実用化を図 り、人命の救助, 被害の拡大や経済的損失を防止することを目的とした
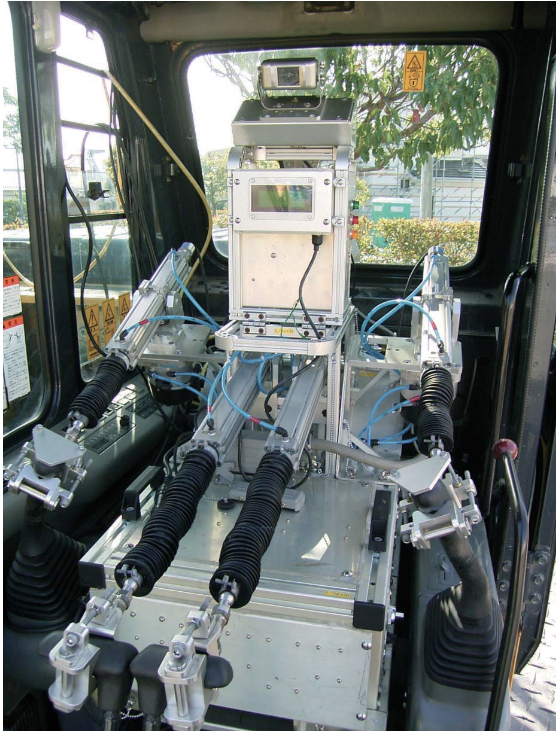
全国に市販されている殆どの油圧ショベルの座席に搭載を可能 にすること、また第一の苦労・工夫した点は既存の自動化を担う機 器と耐振動性の向上を一層推し進め、 これに小型カメラと無線技 術を連携した画像データの送受信・処理技術を効果的に組合せる ことにあった。
建設ロボットの開発対象機械は災害復旧作業において最も使用 頻度が高いと考えられる油圧ショベルとした。1997年(平成9年) ロボットアーム・プロトタイプ機を製作。1998年(平成10年)試作 機、1999年(平成11年) には実用機(遠隔操縦用建設ロボット;資 料添付)を完成。そして2000~06年(平成12~18年)実際の 現場への応急復旧に出動するなどの実績、さらに2001~02年 (平成13~14年)本ロボットの効率化を図るための実験により、 その有用性を確実なものとした。