

近接覚センサー TK-01
[株式会社Thinker]

概要
赤外光反射式の小型近接覚センサーで、高速手探り動作を実現するためのセンサーである。このセンサーは、対象物からの反射光量を高速処理し、1.5~20mmの近距離計測および傾き角度の計測が可能である。ロボットの指先に搭載することで、対象物の配置誤差や環境変化に対応でき、透明物体や鏡面物体も高精度に計測できる。また、非接触・接触センサとしての応用も可能で、高速手探り動作により作業効率と精度を向上させる。これにより、特にFA分野や食品産業などでの自動化ニーズに対応できる。
評価のポイント
カメラを使ってもロボットが苦手な作業(イレギュラー、不定形物、バラ積み)の自動化し、高価で処理が遅い3Dビジョンセンサーを使わず、本近接覚センサーによって安価に実現した。器用で高速のピッキングが実現できるという点で優位性があり、他のセンサーや柔軟指などとの組み合わせにより、幅広い応用が期待できる。2×2の赤外線発光・受光素子を用い、赤外線反射強度の空間的パターンの特徴量抽出をAI(機械学習)によってハンドリングする対象物の位置・姿勢を計測できる点が最大の強みである。社会的ニーズは明確であり、先進性・独自性・競争力のある技術である。
ロボット手先のラストワンインチを埋めるセンサー
概要
TK-01は赤外光反射式の非接触式小型センサー(近接覚セン サー)です。対象物の表面からの反射光量を独自のエッジAI 技術で 高速処理(1秒に200回程度)することで、近距離計測(1.5~ 20mm)が可能であり、傾き角度も計測できます。ロボットの指先に TK-01を搭載し、対象物の間のラストワンインチをセンシングする ことで、対象物の位置や外部環境の変化に適切に対応できるロボッ トシステムを構築できます。また、安価なシステム構成で透明物体 や鏡面物体をも計測することが可能であることから、これまでコス ト・計測性能面でロボット導入が見送られてきた現場への提案が可 能になります。
開発に至った背景
我が国では、多業種において、労働人口減少による更なる自動 化ニーズが高まっています。しかし、従来の一般的なロボットは予 め教えられたことを高速かつ高精度に繰り返すことが得意である 一方で、「対象物の位置や状況変化に適応して自動的に作業を行 う能力」は未だに低く、少量多品種生産やバラ積み作業の多い製 造現場等には、人力に頼らざるを得ない作業が多く残っています。 この課題解決のため、ロボットシステムへの採用が主に検討され てきたのは、3Dビジョンセンサー(カメラ)と画像認識の組み合わ せです。ただし3Dビジョンセンサーは高コストであり、扱う側に高 い専門知識が必要であるといった導入時の課題があります。対象 物を俯瞰するビジョンセンサーと、対象物に近い手先において必 要な位置調整を行うことができるTK-01の組み合わせにより、シ ステムコストの大半を占めるビジョンセンサーを低機能でも足り るものとし、現場へのロボット導入ハードルを低減できます。
今後の展開
TK-01は対象物に接触しない非接触センシングによるロボット 指先の位置決め制御がメインの応用方法ですが、例えばバネ機構 を備えた柔軟に動く指先モジュールとTK-01を組み合わせること で、指先を対象物に接触させる使い方も可能です。これは、指先モ ジュールが対象物に接触した際に生じるバネ機構の姿勢・位置の 変化をロボットハンドの中に配置したTK-01でリアルタイム計測 する仕組みです。指先が柔軟であることから、高速動作時に衝撃 が発生しにくく、ビジョンセンサーがなくともバラ積みされた対象 物をまさぐりながらピックアップすることも可能になります。さら に、低コストの2Dビジョンセンサーで平面上の対象物の位置を把 握し、高さはTK-01によるセンシングで補完することで、割れやす い食品を吸着ピッキングできている事例もあります。TK-01は、こ のように他の機構と組み合わせることで、幅広い応用開拓が可能 であることも特徴です。
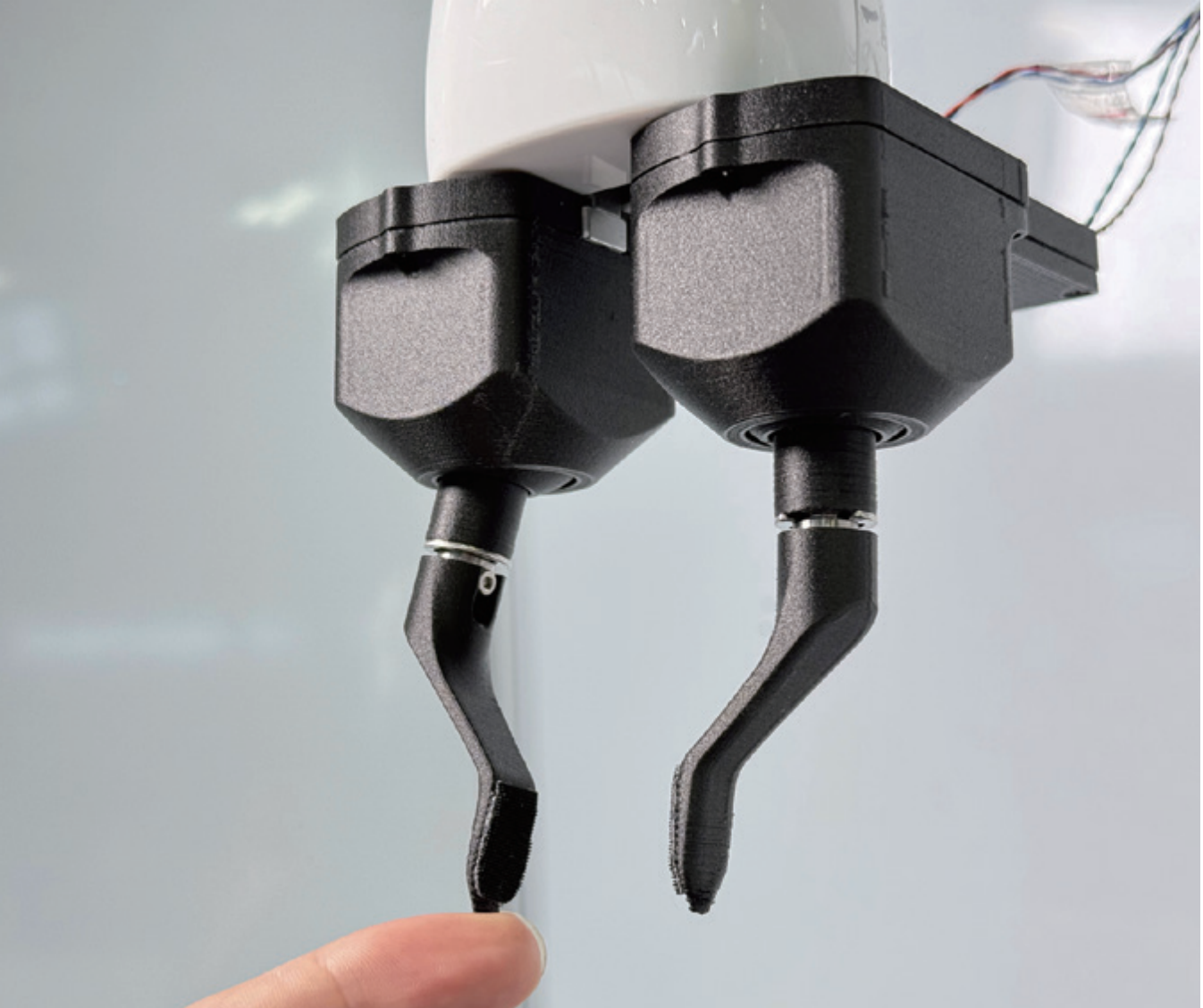
近接覚センサーを利用したバラ積みピッキング用ハンド