

超小型MEMS 3軸触覚センサーチップ
[東京大学 パナソニック株式会社]
概要
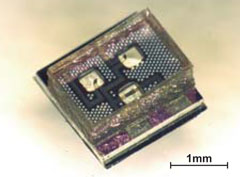
圧力だけでなく2軸のせん断力(摩擦力)をも検出可能な超小型3軸触覚センサーチップ。MEMS技術の利用により、2mm×2mm×0.8mmという微小な構造を実現。例えば、ロボットハンドにセンサーチップを実装することで、掴んだ物の滑りや重心位置を認識することが可能となり、より確実なハンドリングが期待できる。2010年頃の量産開始を目指す。
評価のポイント
ロボットのための触覚センサー/超小型・超軽量・高感度/チップ化のメリット
産業用に限らず広い範囲でのロボットの実用化を考えた場 合、家庭での家事介護支援や公共の場での労働支援など、従 来よりも人に近い場所での使用は欠かせません。これらの環 境で安心・安全に動作するためには、人や物との予期せぬ接 触に対してはこれを確実に検知する、またロボットハンドなど で主体的に接触する際には優しくかつ柔らかく、さらに適切 な力で的確にコンタクトする必要があります。これらの機能 を実現するためには、ロボットの全面に実装でき、かつレンジ が広いロボット用触覚センサーが必要となります。さらに、従 来の触覚センサーは圧力の検出がメインであり、センサー面 に平行な滑り方向の力(せん断力)を満足のいく性能で検出 できるものはありませんでした。また、触覚センサーの代替と しての3軸力センサーはサイズが大きく、ロボットの関節には 組み込めても、表面に実装することはできませんでした。そこ で我々は、指先に実装できる程度に小さく薄く、かつ圧力及び せん断力が測れる触覚センサーの開発を進めました。その成 果が「超小型MEMS3軸触覚センサーチップ」です。
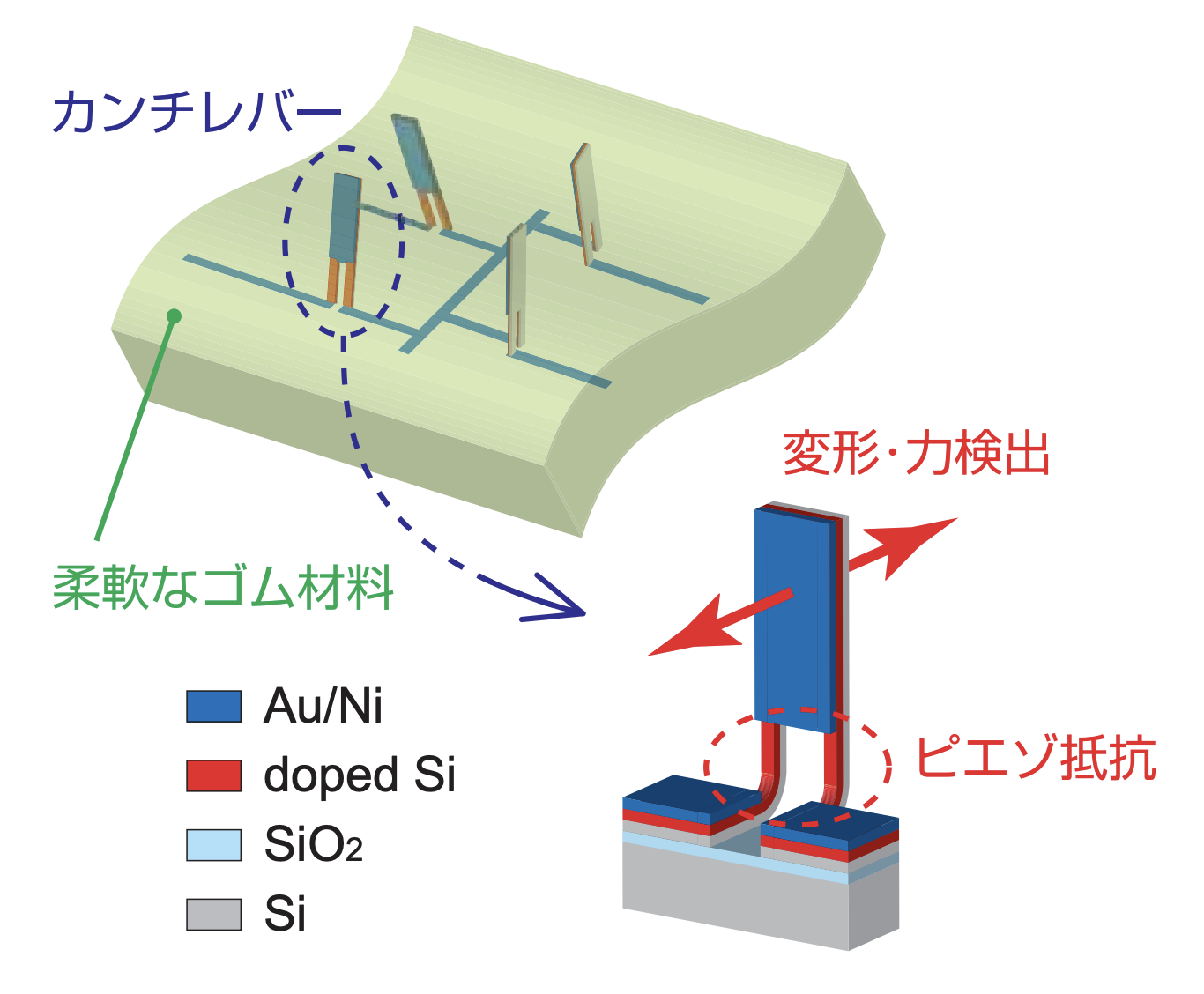
「超小型MEMS3軸触覚センサーチップ」はMEMS(Micro Electro Mechanical Systems)技術を用いて製作されて おり、2mm×2mm×0.8mm(幅×奥行き×高さ)と米粒の半 分程度のサイズのチップの中に圧力センサー、並びに2軸の せん断力センサーが作りこまれています。この力センサーは ピエゾ抵抗カンチレバーと呼ばれるもので、カンチレバー(片 持ち梁)の根元にピエゾ抵抗層が形成されており、変形を抵 抗値変化として読み取ることが可能です。ピエゾ抵抗の感度 は金属ひずみゲージを上回る優れたものであり、後段の処理 回路は金属ひずみゲージと同様、ブリッジとアンプのみが必 要とされます。またセンサーチップの重量は4mgと非常に軽 く、チップ1つあたり最小で0.3gの重さが測れます。
本センサーチップは、チップ自体が非常に小型であるため、任 意の曲面上に任意の密度で実装することが可能です。例えば 指先など繊細な触覚が必要とされる場所には密に配置し、手 の甲や腕など繊細さがさほど必要でない場所にはまばらに配 置するなど、使用用途やコストに応じて自由な設計が可能と なります。さらにチップを埋め込む柔軟材料の硬さを変える ことで、センサー感度を自由に設定できる点もメリットの一つ です。例えばシリコーンゴム などの柔らかい材料で埋め れば人の触覚と同程度の感 度が実現できる一方で、ポリ ウレタンやエポキシ樹脂な ど硬めの材料で埋めれば撃 力すらも計測することが可 能となります。

センサーチップと米粒との サイズ比較
様々なアプリケーション
ロボットハンドを用いた把持やなぞりといった動作は、触覚を 用いることで飛躍的に進歩する動作の一つといえます。例え ばコップに水を注ぐとき、次第に増えていく重量を腕全体で 感じながら、コップが滑り落ちないよう握力を強めていく必要 があります。ただ紙コップなどは強く握りすぎると潰れてしま いますので、コップを落とさない程度の適度な握力で持つの が好ましいと考えられます。では注ぐ側はどうでしょうか? ペットボトルからお茶を注ぐ場合、ペットボトルを傾けていく とその重心位置は次第に変化していきます。把持した位置と 重心位置とが離れてくるとモーメントが大きくなり、ペットボ トルはハンドの中で回転しようとします。これに対応するため には重心位置を正確に把握し、ペットボトルを持ち直すか、握 力を強くしていく必要があります。人は指先の鋭敏な感覚と豊富な経験によりこれらの動 作を難なくこなしますが、ロ ボットが同様の動作を行うた めには高性能な3軸触覚セン サーが必要です。そして本セ ンサーチップの使用により、 確実な把持動作、並びに把持 物体の重心位置検出が実現 できます。 また人の指先は物体の表面 の凹凸を認識し、ある程度ま では材質をも判別可能です が、物体の表面に触れるだけ でなく、その表面をなぞることで凹凸の定量化が可能となる ことが知られています。このなぞり動作にもせん断力の検出 が大いに役立つと考えられます。

ロボットハンドへの搭載事例
今後の展開
2008年度時点では量産化前の段階として少量ずつ製作さ れていますが、今後は半導体製造技術・MEMS技術による生 産性の向上・収率の向上を目指していきます。具体的には MEMSファウンドリー利用による試作を2008年度上期から 開始しており、2010年頃の量産開始を目標として研究・開発 を続けていきます。また現時点ではロボット用のセンサーと して、人の手で実装できるサイズに設計・製作していますが、 MEMS技術としてはまだまだ余裕のあるサイズといえます。 例えば貫通電極を用いた裏面配線技術を利用すればSMD (表面実装部品)と同様に扱うことが可能となりますので、実 装工程の機械化によりさらなる小型化が実現できるものと考 えております。
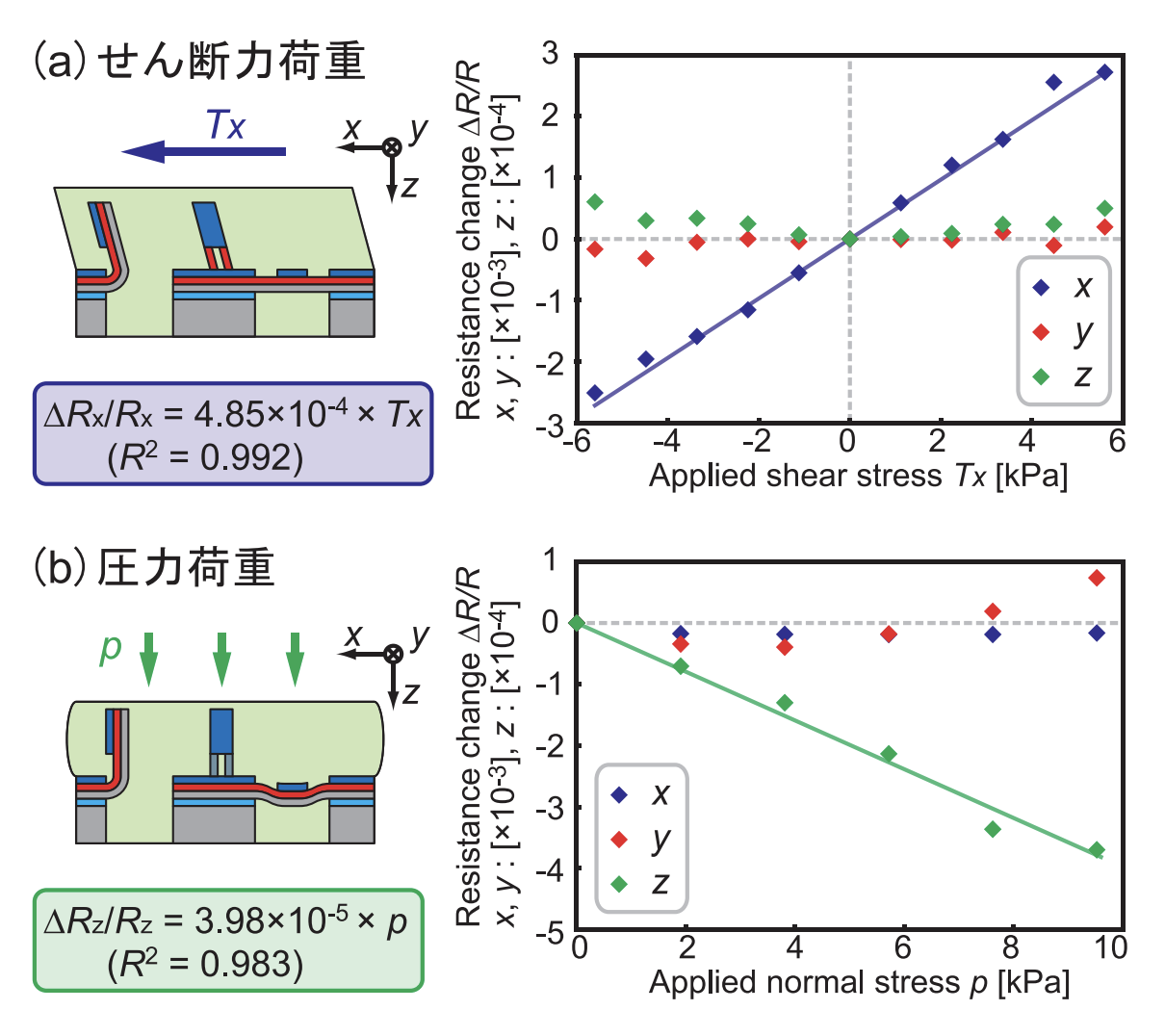
センサーチップの特性