

超小型月面探査ローバLEV-1&LEV-2
[国立研究開発法人宇宙航空研究開発機構/中央大学 /国立大学法人東京農工大学/ 同志社大学/株式会社タカラトミー /ソニーグループ株式会社]
概要
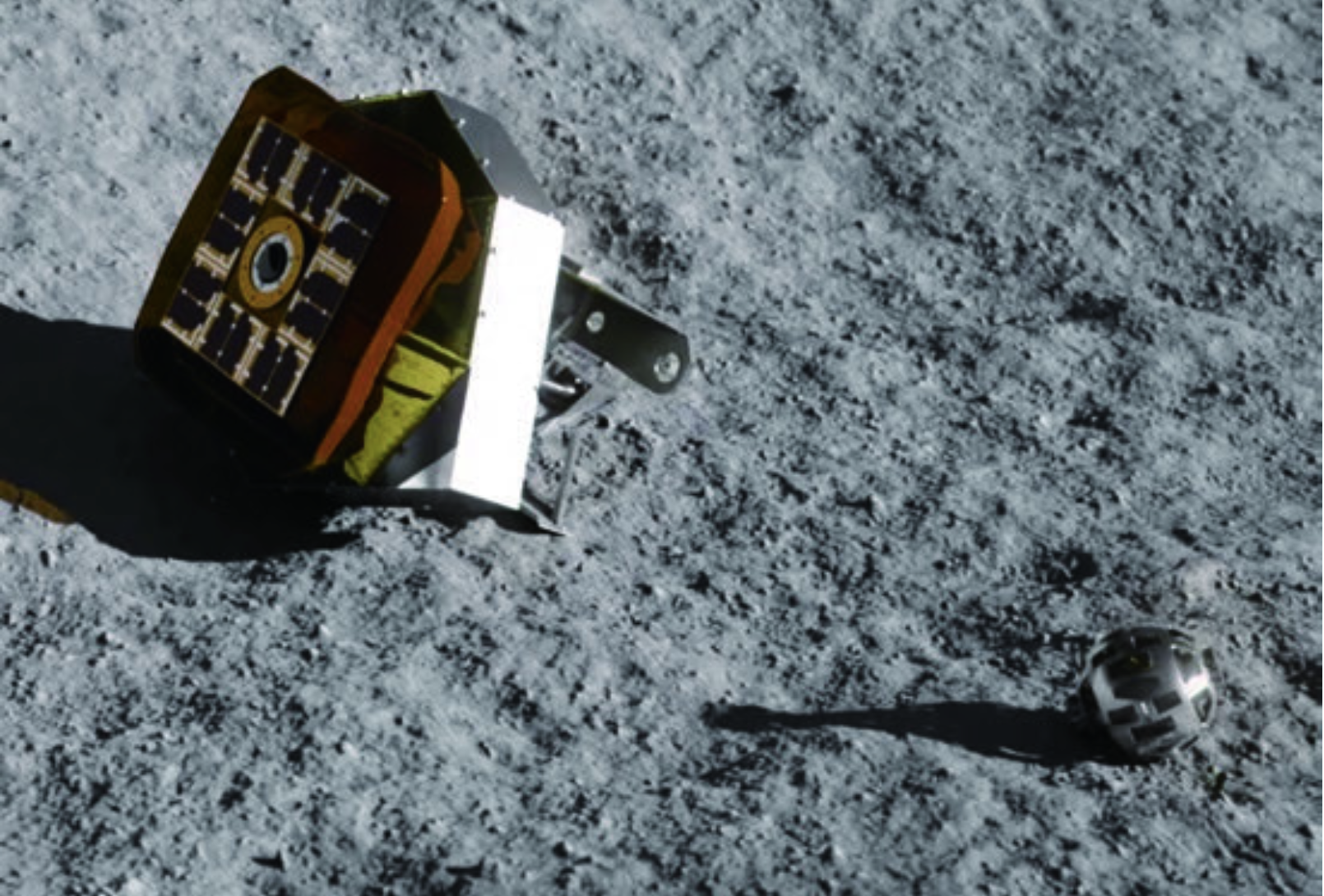
日本初の月着陸機SLIMに搭載された超小型月面探査ローバ(LEV)が、月面で連携してミッションを遂行した。LEVシステムはLEV-Mと2台のローバ(LEV-1とLEV-2)で構成され、2024年1月、SLIM探査機の着陸直前にLEV-1とLEV-2が独立して月面に展開された。LEV-1は単一の車輪で方位制御や跳躍移動を行い、環境状態の観測を実施。LEV-2はSLIM探査機を発見し、その画像を撮影してLEV-1に送信しながら周囲を走査した。LEV-1はデータを地球へ直接送信する能力を持ち、LEV-1は世界初の跳躍移動型ロボット、LEV-2は世界最小・最軽量(質量228g)の月面探査ロボットとして、完全自律でのロボット間通信・地球へのデータ送信に成功した。
評価のポイント
人類の活動領域拡大に向け、月惑星探査のニーズが高まっているなかで、今回の月面探査ミッションでは、月面での自律変形・移動(跳躍)、LEV-1などの自律撮影・地球への画像送信が達成された。 また、今後、宇宙開発、月惑星探査は、民間での技術開発も期待されるなかで、小型化・コストダウンを実現した。これらの成果は、今後の月面探索につながる成果であるとともに、今後の宇宙開発、ひいては科学技術の発展に大きなインパクトを与えるものである。
日本初の月面探査ロボットLEV-1/LEV-2
ロボットの概要
LEV-1、LEV-2は月着陸機SLIMに搭載された小型ロボットで、 日本で初めて月面を移動探査したロボットとなりました。 その特徴は以下の通りです。
ホッピング移動による高い走破性
LEV-1は、大きさが小さいがゆえの不整地における走破能力の 低さをホッピングによる移動でカバーしています。
画像を用いた完全自律探査
LEV-1、LEV-2は、取得したカメラ画像から周囲の地形や物体を 認識し、地球からのコマンドなしに完全に自律的に探査します。
地球直接通信とロボット間通信
LEV-1は、SLIMなどの中継機は不要で地球と直接通信します。 また、ロボット間通信により複数台で連携した探査を行います。
月面での動作
2024年1月20日(日本時間)にSLIMから月面に向けて放出さ れ、SLIM着陸地点周囲を完全に自律的に探査し、取得したデータ を地球に直接送り届けました。 • 放出後、LEV-1は約2時間動作、7回のホッピング移動を行いま した。 • LEV-2が取得したSLIM本体の着陸後の状態を捉えた画像を LEV-1経由で地球に送信しました。 • LEV-1はアマチュア無線の周波数(UHF)も使用して月面から データを送信し、世界初の月面アマチュア無線局となりました。
今後の月面探査への適用
地球と直接通信可能な独立した小型ロボットの出現により、誰で も月面探査が可能な時代になりました。
月面着陸ミッションの支援
着陸機から分離して独立動作するため、着陸後の状況の把握が確 実になります。
小型で安価な月面探査ロボットの提供
複数ロボットを用いた面的探査に適しています。
中継通信
別のロボットのデータを地球に向けて中継送信します。
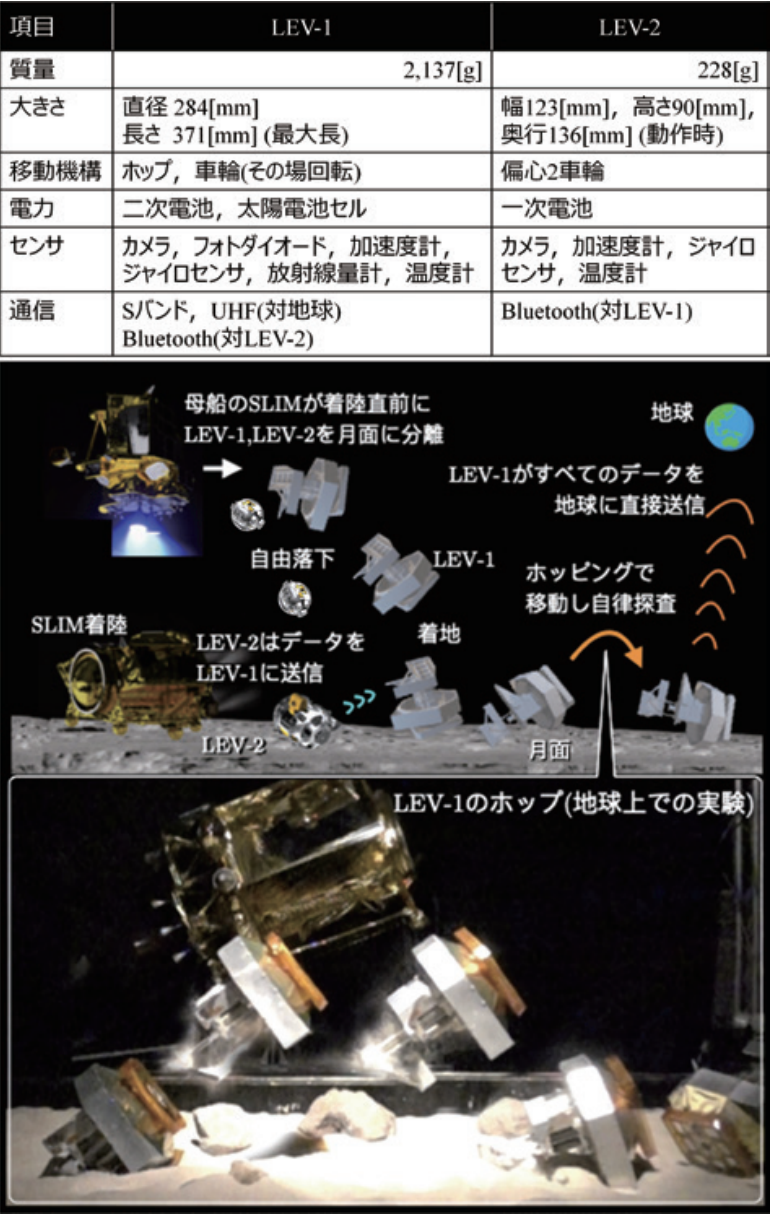
LEV-1とLEV-2の仕様と月面でのミッションのイメージ