小型ヒューマノイドロボット HOAP
[富士通株式会社 株式会社富士通研究所 富士通オートメーション株式会社]

概要
二足歩行制御、カメラやマイクを使ったコミュニケーション、視覚と動作を連携させたロボット制御の研究開発用小型ヒューマノイドロボット。高性能なアクチュエーター、姿勢安定のためのライブラリーなどを装備した身長60cmの本体に、制御プログラムの事前確認が可能なシミュレーションソフトが標準添付され、また、内部インターフェース情報が公開されているため、開発ユーザーが自由で高度なロボット研究開発を行なうことが可能である。2001年より本格的二足歩行ヒューマノイドロボットとして販売され、国内外の大学、研究機関、企業などで通算129台の販売実績である。全世界でのHOAPを使った様々な研究が二足歩行ヒューマノイドロボットの開発速度を高めている。
評価のポイント
研究開発のオープンプラットホーム
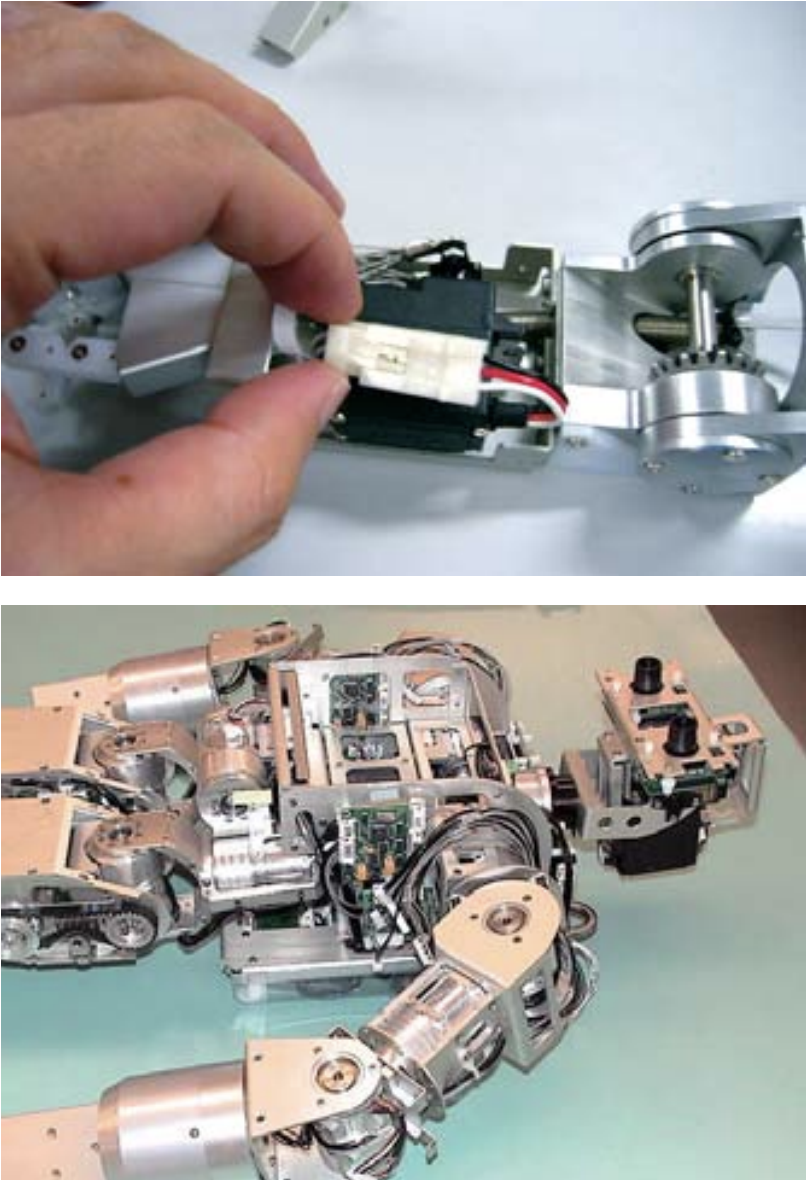
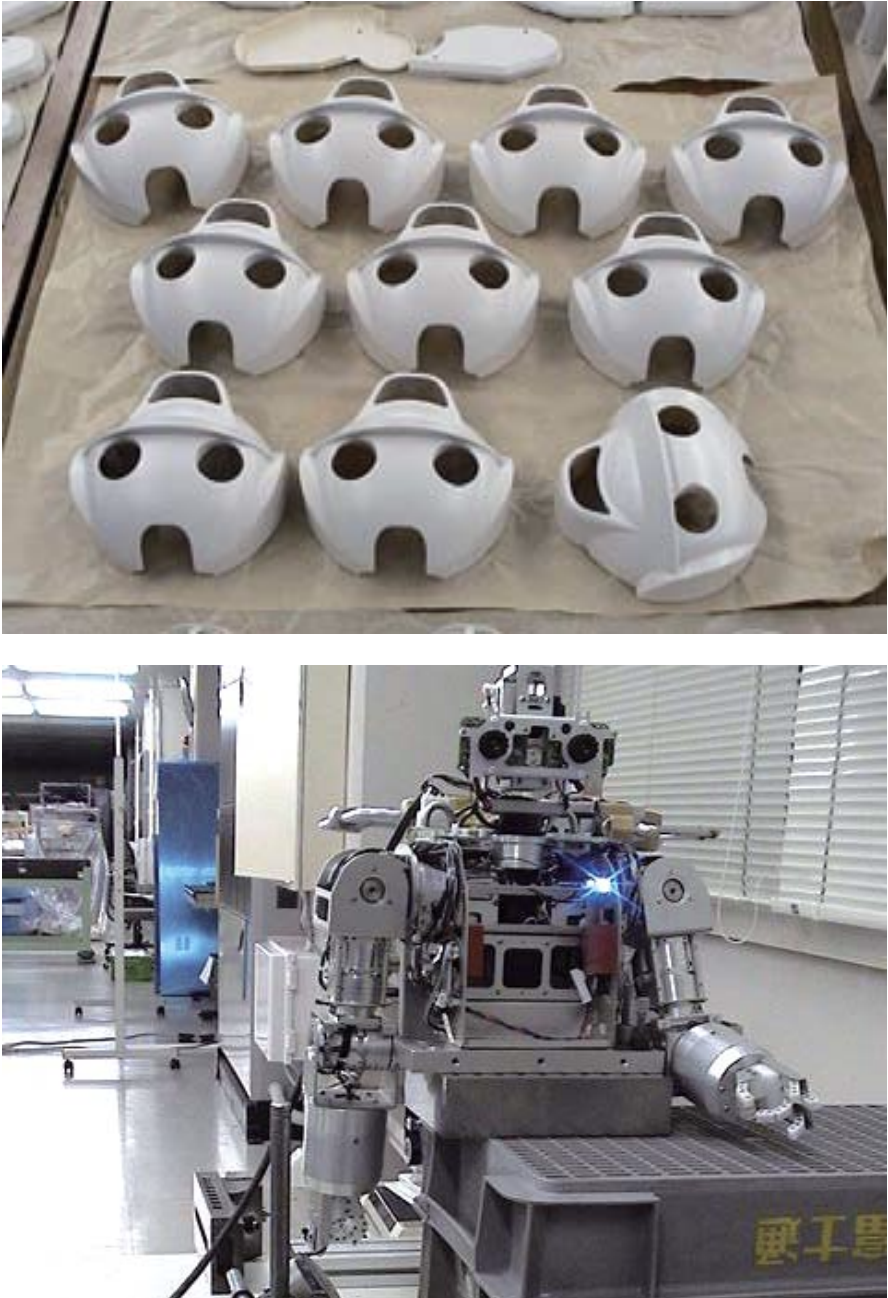
これまで、ヒューマノイドロボット研究者は、ロボット の製造、メンテナンスおよび実験時の安全確保に多 大なリソースを消費してきました。私たちは、その状 況を解決することを目的として、片手で抱え上げら れるレベルに小型化したヒューマノイドロボット、 HOAP(Humanoid for Open Architecture Platform)を運動生成ソフトも含めた研究用プラッ トフォームとして開発しました。これまで、HOAP-1 から最新のHOAP-3まで計3シリーズを販売してお り多くの研究者にご使用いただいております。 HOAPは、研究用プラットフォームとしての汎用性を 持たせるために、公開された開発環境である RT-LinuxをOSとして採用しています。さらに、モータやセンサの追加で生じる計算機負荷の増大を抑 えるためにデバイス拡張が容易な分散制御体内 LANシステムを実現しています。そのキーデバイス となるのが、関節に用いるアクチュエータです。具体 的には減速機に曲げ強さ330MPaという金属並の 高強度を持つ樹脂を用いてパワーウェイトレシオを 市販品に対し70%アップさせました。さらには、そ の減速機を連結したモータをアクチュエータユニッ トとしてUSBインタフェースモータ制御回路と一体 でモジュール化し、最大40個のアクチュエータを 1ms周期で協調制御可能にいたしました。運動生 成に関しては、CPG(Central Pattern Generator) を基本単位とし、逐次学習可能なリカレントニュー ラルネットワーク(RNN)を用いました。これは、摂 動法における各次数間での微分方程式系の独立性 を利用して、学習の効率化を図っているもので、同 時に決定すべき未知変量が減り、高速な学習が可能 となります。このRNNをより容易にインプリメント する言語(RNN言語)も提供しております。これに加 え、運動制御を専門としない研究者向けには、直進, 旋回等の安定歩行パターンをユーザ側でダイナ ミックに連結可能な動作ライブラリを提供し、容易 にヒューマノイドロボットを操作できる環境を実現し ています。HOAPのシリーズ開発過程においては、 動作パターンや表現力の向上を目的とした可動自 由度拡張の他に、音声や視覚等の人間とのコミュニ ケーションデバイスを強化してまいりました。これにより現在ではインタラクションなどを目的とした、 ヒューマノイドロボットの応用研究分野にも広がり をみせております。

ユーザー要望の徹底したフィードバック実現
開発仕様の策定過程においては、ユーザ様の研究 状況やご意見を伺う機会として、当社の開発担当も 交えたユーザミーティングを開催させていただき、 貴重なご意見を多数頂戴いたしました。沢山の研究 者の方にリピート購入をしていただいたのは、このよ うなお客様の要望を開発者にフィードバックする手 法を構築できたからだと感じております。HOAPシ リーズは本格的な研究用ロボットとして販売をして おりますが、展示会でも活躍をしており、とくに地域 ICT未来フェスタには、2005年より参加しておりま す。今年の開催地である青森にも参加しました。 HOAP-3のコミュニケーション機能を使って、ナ レータとの会話形式のデモンストレーションを行っ たり、子供達にジョイスティックを使って操作体験な どをして頂き、未来のロボットユーザに最新のロボッ ト技術に触れて頂きました。2007年11月現在、 HOAPシリーズは国内外に129台出荷しておりま す。このたび、このような名誉な賞を頂いたのは、ご 支援、ご指導いただいた多くの研究者の方々による ものであり、この場をかりて御礼を申し上げるととも に、引き続きHOAPシリーズを御引き立てください ますようお願いいたします。