人共生型上半身ロボット(DIA10)・腕ロボット(IA20)
[株式会社安川電機]

概要
2007年問題や少子高齢化による労働力不足の解消を狙いとする人間型産業用ロボット。人手作業に頼ってきた製造工程の自動化を可能とし、ロボット化による品質の安定等を目的とする。 DIA10: 上半身同様の大きさと自由度を実現した15軸ロボット IA20: ヒトの腕と同様の動作が可能な7軸ロボット
評価のポイント
組立作業等の労働力不足解消へ向けて/従来の生産ラインを変更せずに導入
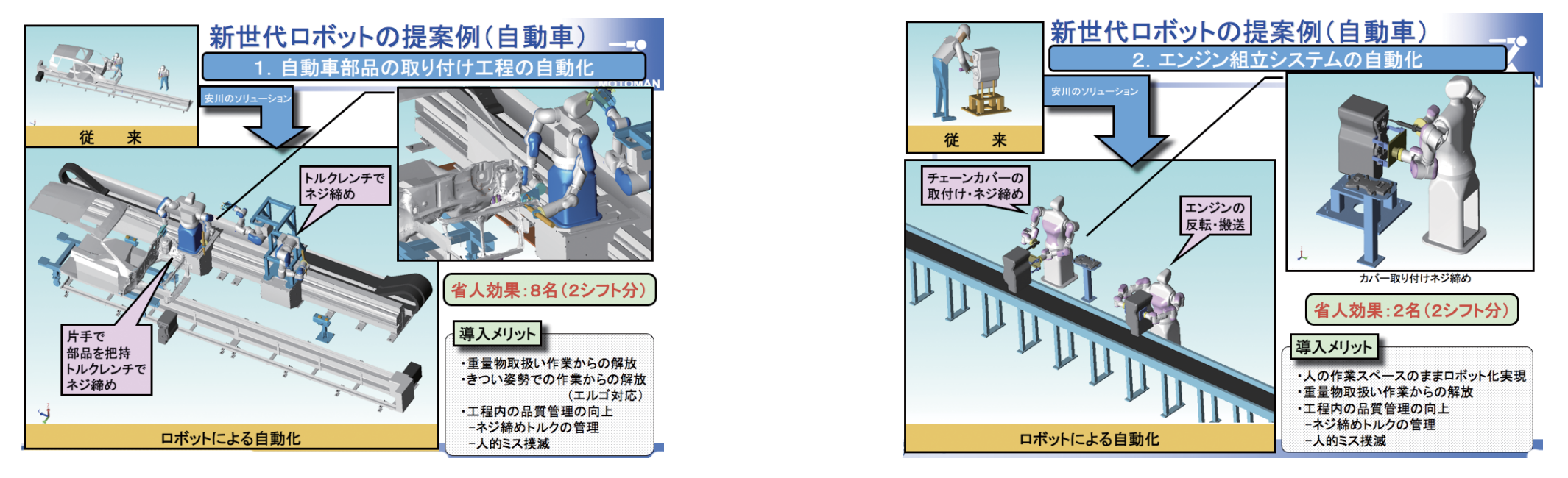
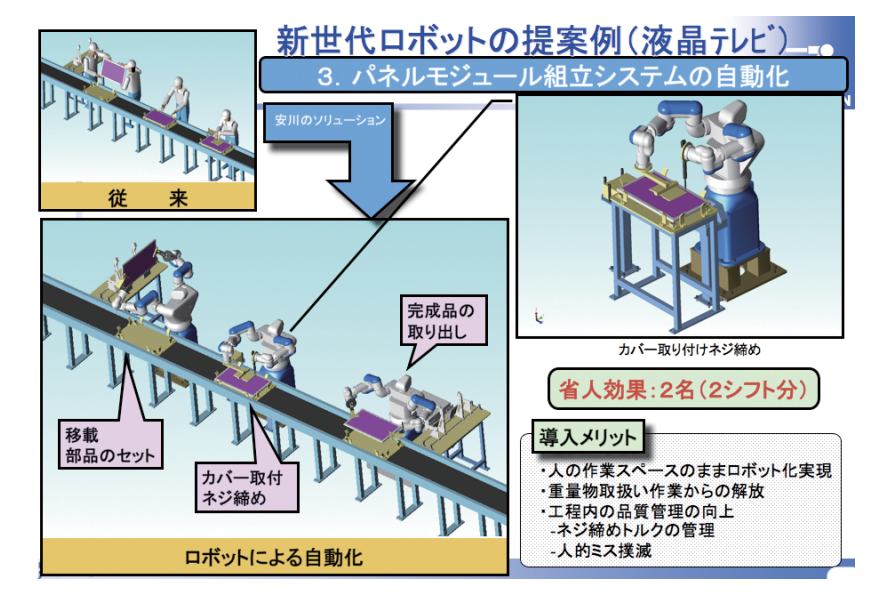
国内少子高齢化による労働力不足を背景に、人手に頼っている組 み立て工程等を効率化したい顧客要求を解決する製品。重いも の、繰り返し頻度が高く速度や精度が求められるもの、従来のロ ボットでは、置き換えが難しかった工程(組み立て等)に適用可能と なっている。ロボット化による省力化や過酷な条件か来る労働災害 の大幅低減(エルゴ対策)に貢献できる。好調に業績推移する自動 車業界からの反響が大きく、国内自動車メーカ各社の生産技術部 からの引き合い多数、すでに100台以上を納入済み。以降は本格 的な生産ラインへの適用が期待でき、来年度1000台、3年後に 3000台の納入を計画している。特に現在30万人と言われる組立作業の労働力への対応が期待されている。また、自動車以外の 分野でも多くの適用依頼を受けており、労働力不足解消への期待 が大きい。
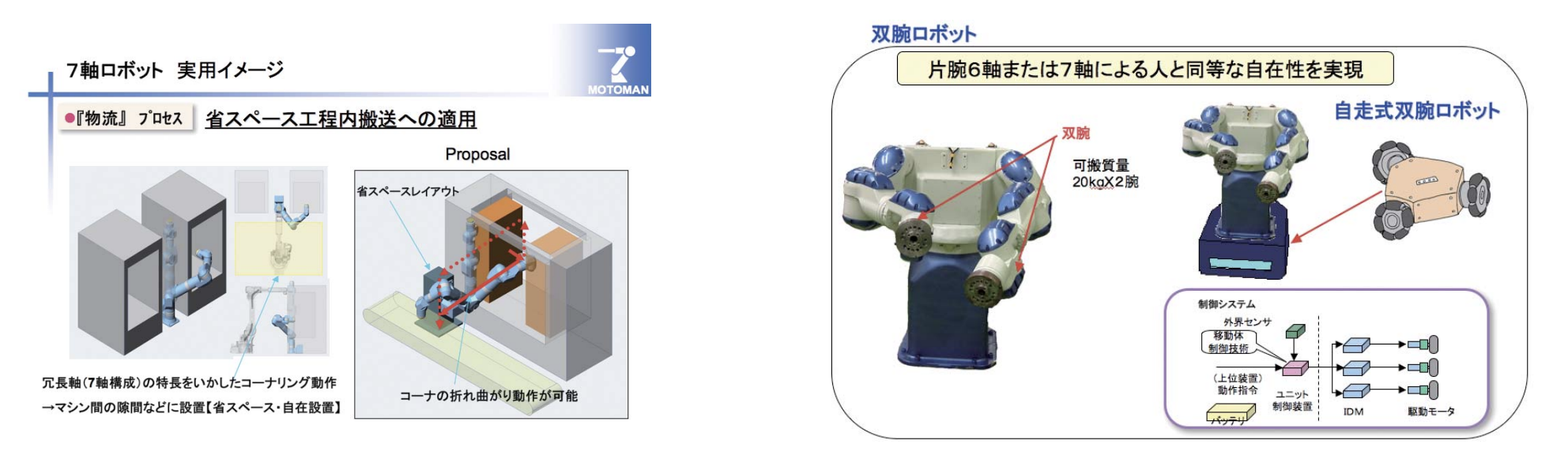
人が行っていた作業をロボット化のための大幅なライン変更なし に、ロボット1台で作業員1人と置き換えが可能、投資コストが大幅 に抑えられる。大きさ形は成人に近く、やわらかく安心感を与える デザインとなっており、人とロボットが隣同士で作業する等、多彩 なラインアレンジが可能。腕の稼動範囲や作業速度は人以上と なっている。各腕は協調して複雑な作業を行うことや、それぞれの腕が別々の作業を正確に行うことができることから、人以上の作 業効率を得ることも可能で長時間作業が可能となっている。大き な物を運ぶ場合には両手を使うことで単純なハンドにより把持が 可能となり複数のワークにも対応が容易になりやすい。(大きな段 ボールを片腕で運ぶには大きな冶具が必要だが、両腕だと簡単な ハンドで可能)また腕ロボットでは、胴体が邪魔になるような狭い 場所への侵入、作業が容易。人では無理な姿勢になりがちな作業 への適応を進めている。
簡易なプログラム設定と人と共存するデザインの考慮
今まで人が行っていた作業領域に大幅な構成変更なしに適用でき る産業用ロボットは業界初。ロボットを制御するコントローラは、当 社が多くの販売実績を持つ垂直多関節型ロボットのコントローラ を流用し技術的安定性を確保しつつ24時間動作が可能。またプロ プラミングペンダントも操作性、プログラム方法の容易さで高い評 価を得ている。当社ロボットの使用経験があれば最小のトレーニン グで操作が可能である。またプログラミング中のロボット動作速度 は低速に制限しており人への安全性を確保している。特に見た目 もやわらかいデザインを採用し、近くで動作した際の違和感を無く すよう考慮している。
柔軟性と小型化への挑戦
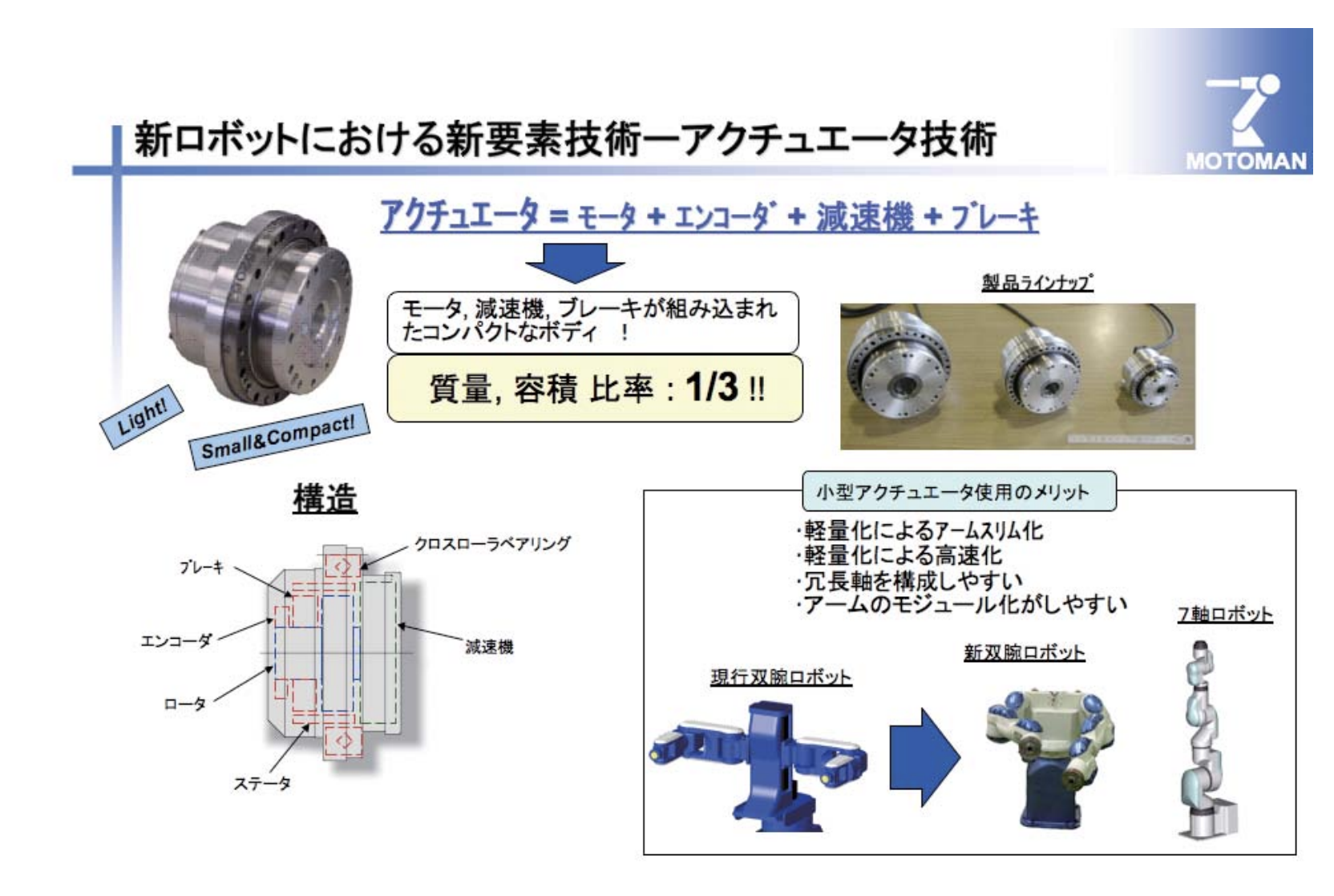
従来人手でしかできなかった組み立てや物流工程に人間に近い形 や動きをするロボットを開発して、まずロボットが人間と共存して 人の一部作業や補助作業を行う。また将来はロボット自身が知能・ 自立性を持つことも展開してゆく。 組み立て用途に最適化したロボットの開発は、国内少子高齢化に よる労働力不足を背景に、人手に頼っている組み立て工程の生産 性改善を望む顧客要求に対し、当社は産業用ロボットの新たな用 途開拓を推進してきた。 本ロボットは、製造ラインの組み立て工程において、人が行ってい た作業をロボット化のための大幅なライン変更なしに、ロボットに置き換えることを可能とした。 この開発コンセプトのもと、人の優れた能力に近づき超えようと、 人の上半身をイメージして開発してきた。 ロボットサイズを人間とほぼ同じ大きさに抑え、人の腕のように柔 軟な動作を得るために7つの関節を採用した。そしてこの関節部 分の小型化がロボット開発の最重要課題であった。 従来、ロボットの関節部分にはモータ・減速機・エンコーダ・ブレー キなどの動力機構が埋め込まれており大きな容積を占めていた。 このため今回の構造のロボットを開発しようとすると関節同士が 干渉し、人の腕のような広い屈伸角度や動作領域を実現できな い。今回、当社が得意とする電動機技術を応用し、モータ・減速機・エン コーダ・ブレーキを一体化した小型動力機構(従来容積比1/3)を 開発し関節部分へ埋め込めたことが本ロボットの開発成功につな がった。 さらに、小型動力機構の中心部は、大口径の中空構造になってお り、各関節やエンドエフェクタ用の配線・配管を通すことが可能で す。これにより配線・配管を腕の中に収納でき、アーム外周部での 引き回しがなく、周辺機器との干渉を気にする必要がないため信 頼性の向上にもなり、人間の上半身のような形や動きをするロボッ トが実現できた。