

超高圧送電線の活線点検ロボット「Expliner(エクスプライナー)」
[株式会社ハイボット 東京工業大学 関西電力株式会社 株式会社かんでんエンジニアリング 株式会社ジェイ・パワーシステムズ]

概要
超高圧電線を遠隔操作で移動し自動で活線点検するロボット。これまでは、点検のため一時的に給電を遮断していたが、本ロボットは送電を止めることなく、障害物等をよけながら複数・長距離の送電線を連続点検できる。
評価のポイント
従来、人手で行っていた危険な作業から作業者が解放されること、また、生活の要である電力を停めずに点検作業が行える点が評価された。また、新規性の高いロボットであること、国内外への市場展開が期待される点が評価され、「中小企業基盤整備機構理事長賞」の受賞となった。
高圧送電線の活線点検ロボット
障害物回避動作と点検センサ ―技術的新規性
高圧送電線の活線点検ロボットは、電力ケーブル上に存在するスペーサや碍子懸垂装置などの障害物のために、移動自体が難しく実用的なものは、世界でも今まで実現されてきませんでした。さらに我が国では高圧線を4本の電力ケーブルの束にまとめた4導体方式が多く、この様な4導体電力ケーブルに存在するすべての障害物を踏破出来るものはまったく開発事例がありませんでした。 今回開発したExplinerロボットは、前方と後方プーリを電線で回転させて走行します。細長い筒状のボディを持ち、下方先端にバッテリーやメインCPUを搭載したバッテリーボックスを備えています。 カケーブルに、先端にバッテリーなどで構成したウエイトを取り付けたアームを移動することで、ロボットのバランス姿勢を変えていき、その姿勢変化を利用することで、鉄塔から自動的に乗り移り、4導体電力ケーブルを障害物回避しながら連続的に移動していく運動性能を有しています。 鉄塔にある電線の懸垂がいし装置の回避は次のように行われます。 ①ロボットが、懸垂がいし装置に近づく。 ②重心を後方へ移動し、前プーリーを持ち上げる。前プーリーの軸を回転させ、ロボット前部が回転する。 ③ロボット前部が懸垂がいし装置を回避しながら前進する。 ④重心をロボットの中心部に移動し、前プーリーが電線に乗る。 ⑤重心をロボット前方に移動し、後プーリーを持ち上げる。後方プーリーの軸を回転させ、ロボット後部が回転する。 ⑥ロボット後部が懸垂がいし装置を回避しながら前進する。 ⑦重心をロボットの中心部に移動し、後方プーリーが電線に乗り、障害物回避完了。 このようなコンセプトの高圧線点検ロボットはこれまで世界的に皆無です。 これまで、Expliner(エクスプライナー)は、線間電圧550kV相当の課電をした状態での実証走行試験も行い、正常な動作を確認済みです。また、停電状態の500kVの営業線路において、障害物の回避動作を検証したところ、懸垂がいしの回避を約7分、径間スペーサの回避を約30秒で安全に行うことができました。こうした複雑な動作はマニュアル操縦では無く、半自動化で操縦できるようにプログラム制御しており、作業員の負担を軽減しています。
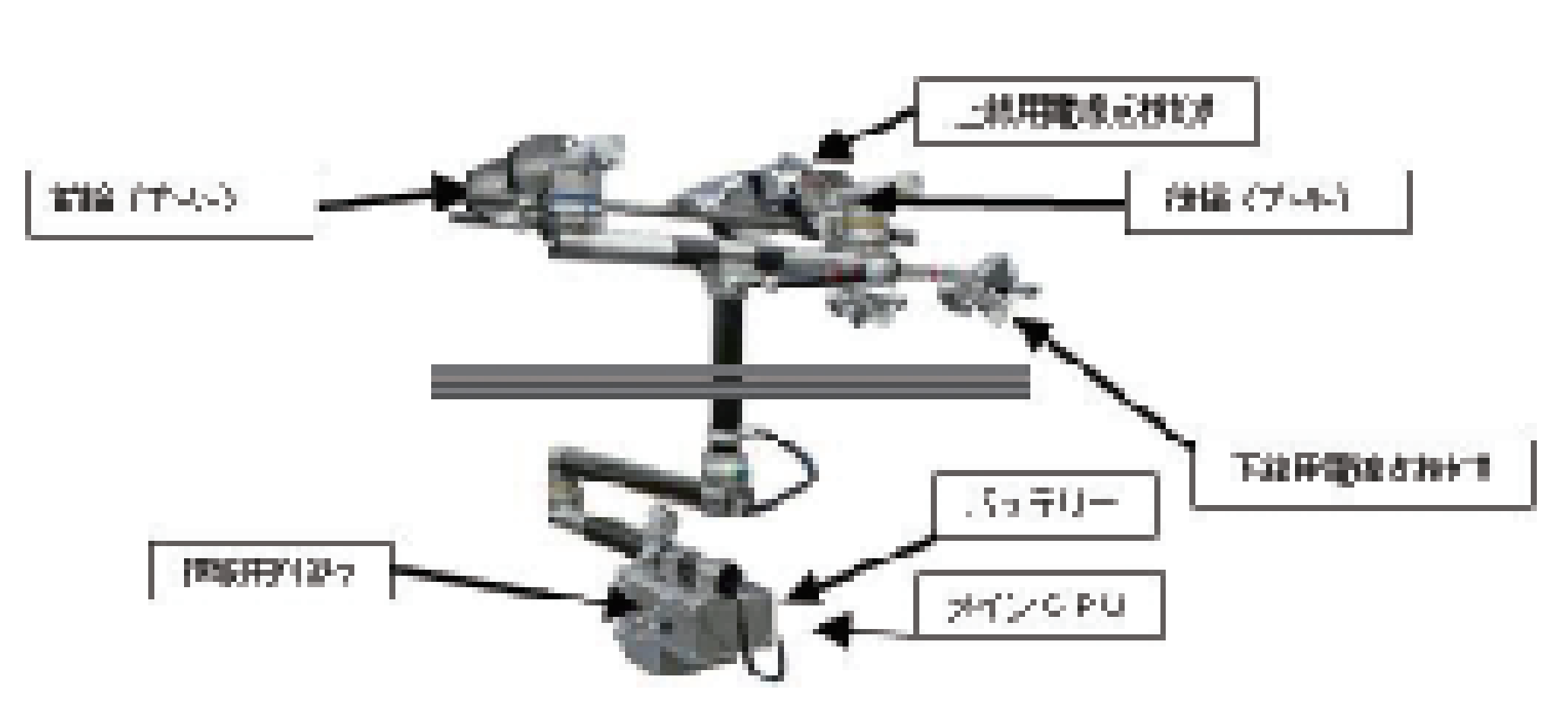
Expliner ロボットの構成図
Explinerロボットを使った点検作業
(1)運搬・組立
送電線路は山間部を経過することが多く、鉄塔敷地まで車両が進入できない場合も考えられます。そのため、人肩で工具、資材等を運搬しなければならない状況でも作業を行うことができるよう、点検ロボットはパーツごとに分割できます。また、容易かつ確実に組み立てることができるよう、ロボットの接続部にはスライド式のアタッチメントを導入しました。
(2)点検ロボットの電線乗り移り方法
超高圧送電線では、電線と鉄塔の距離は約10mと非常に長く、点検ロボットの重量、鉄塔から電線の距離を考慮して、絶縁棒を架け橋として用いる以下の工法を採用しました。絶縁棒も、組立・運搬可能となっています。 ①長さ約10mの絶縁棒を鉄塔上に吊り上げる。 ②絶縁棒を鉄塔から電線に倒しこみ、鉄塔と電線の間の架け橋になるように設置する。 ③点検ロボットを絶縁棒上に設置し、絶縁棒上を走行して電線に乗り移る。
(3)点検性能
Explinerロボットは、4つのケーブルについて、360度すべての方向から近接して観察し、さらにその太さまで計測することが可能です。電線から数センチという近接な位置に搭載されたカメラ部と、その反対側のミラー部、両方から電線の表面が確認できます。また、電線とカメラの距離が非常に近接であることから、電線の外形を検知することが可能となり、電線内部の以上も検査することができるようになりました。 また、電線点検だけではありません。電線点検用の他、ロボット操縦用に搭載されている別のカメラを使い、径間スペーサ等の金具の詳細まで点検できます。 こうした点検結果は、CPUボックスの中に生データとして、点検位置とともに記録され、異常個所がある詳細な地理的位置を確認できます。

絶縁棒を使った電線乗り移り作業
実用化に向けた取り組み
現在高圧送電線は、ヘリコプターや徒歩での巡視のほか、点検員が電線に宙乗りして行う外観点検を行っています。作業員による外観点検は停電が必要となり、電力の安定供給に支障をきたさないよう、停電を行いやすい時期(春、秋)に作業が集中するといった課題があります。さらに、将来的には、高所で働く作業員の高齢化による不足という課題も考えられます。 しかし、本ロボットの導入で、より安全な作業環境を確保できるとともに、無停電での外観点検が可能となり、より安定した電力系統の運用が実現します。 本ロボットの導入は、安定した電力系統の運用に繋がり、また、送電線関係作業の集中の緩和にも寄与する、といった点から、社会の暮らしや産業の基盤を支え、将来にわたる電力の安全・安定供給につながるロボットとして、国内外での実用にむけて期待が寄せられているロボットです。日本国内だけではなく、海外(北米・中国・欧州・南米等)の電力会社から、問い合わせが来ています。 Expliner(エクスプライナー)が、本当に社会に役に立つロボット、実用されるロボットとなるためには、ロボットの技術的な安全性・信頼性の確保・向上もさることながら、点検施工を実際に行っている施工企業との提携が不可欠です。点検作業員の声をフィードバックした使いやすいロボット・コントロール装置の開発や実際のロボット点検作業を想定したトレーニング等を考慮した、高圧送電線点検施工企業とのパートナーシップ提携を目指しています。

高圧送電線上を走行するExpliner