手術支援ロボットiArmS®
[株式会社デンソー/信州大学/東京女子医科大学/株式会社デンソーウェーブ]
概要
評価のポイント
医・工・産融合による手術ロボット実用化
手術品質向上と外科医の労働環境改善を目指して
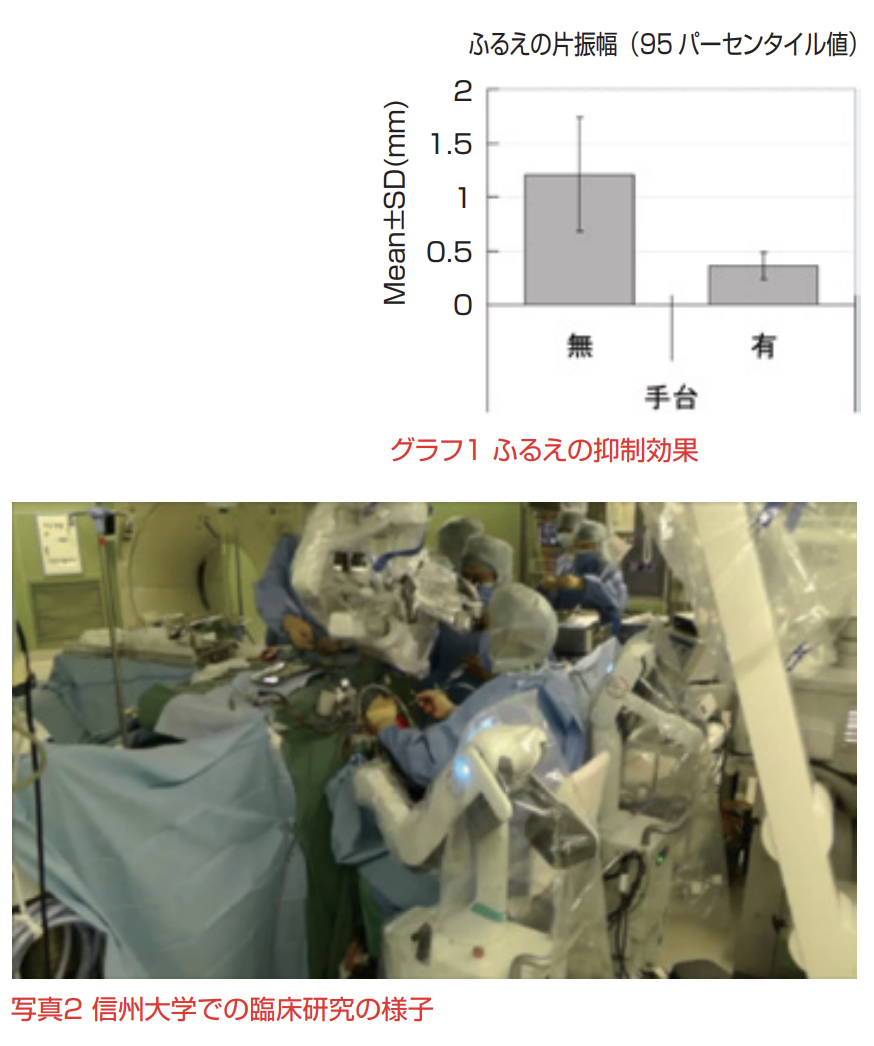
脳神経外科では、顕微鏡を用い大きく拡大して行う手術が一般 的です。脳内の1mm以下の血管を、0.02mmの糸で縫合し、手術 は12時間以上に及ぶこともあります。外科医は手先の動きを安定 させるため、脇を締め、小指を固定し支えるなどの工夫をしていま すが、固定できる場所や、患部へのアクセス方向が大きく制約され ます。また手先を誤れば重大事故に直結するため、精神的・肉体的 に過酷な作業を強いられています。その厳しい労働環境が影響し、 近年、外科医の減少が社会的な問題となっています。 本ロボットは、この現状を打破するために開発されたロボットで す。モータ無で安全性を高める一方、手術時に腕~手首を確実に 支え、軽やかに腕の動きに台を追従させることで、外科医の手のふ るえを1/3以下に抑制し、疲れを有意に軽減するものです。
実用化を目指した医・工・産融合プロジェクト
デンソーが本プロジェクトの検討 をし始めた2011年は、腹腔鏡手 術ロボット「da Vinci サージカル システム」が米国で広まっており、 日本でもその有効性が注目を集め、 先進的な医療機関に導入され始め た頃でした。また、国家プロジェクトとして、手術ロボット研究開発がスタートしており、日本のロボット 技術を活用した日の丸手術ロボットの実用化への期待が高まって いました。 そんな中、2012年から実用化への強い思いを持って、信州大・ 東京女子医大・デンソーでiArmS®の開発をスタートしました。「商 品」として仕立てることは、さまざまな要求仕様(場合によっては矛 盾のある仕様)の全体最適を行う作業です。通常は経験と知識を持 ったプロジェクトリーダの腕に委ねられます。一方、医療機器開発で は、「機能評価は医学研究者」、「課題解決は工学者」と、役割が分離 しているところに全体最適の難しさがあります。今回、多くの問題 の本質をあぶり出し、その全体最適解を導き出すために、医療工 学研究者を核として、医学研究者、企業技術者の三者が、対等で妥 協のない議論を展開してきました。(図1)合同で他大学医学部へインタビューに出向いたり、医学系学会の会場別室に模擬手術セッ トを準備し、多くの先生方の意見を聞いたりするなど、開発へフィー ドバックしてきました。(写真1)このように「日の丸手術ロボット実用 化」という御旗の下に、異なる背景や立場を越え、三者が融合して 開発を行うことで、市販を前提とした臨床研究にこぎつけました。

製品の特徴 ~安全性と操作性~
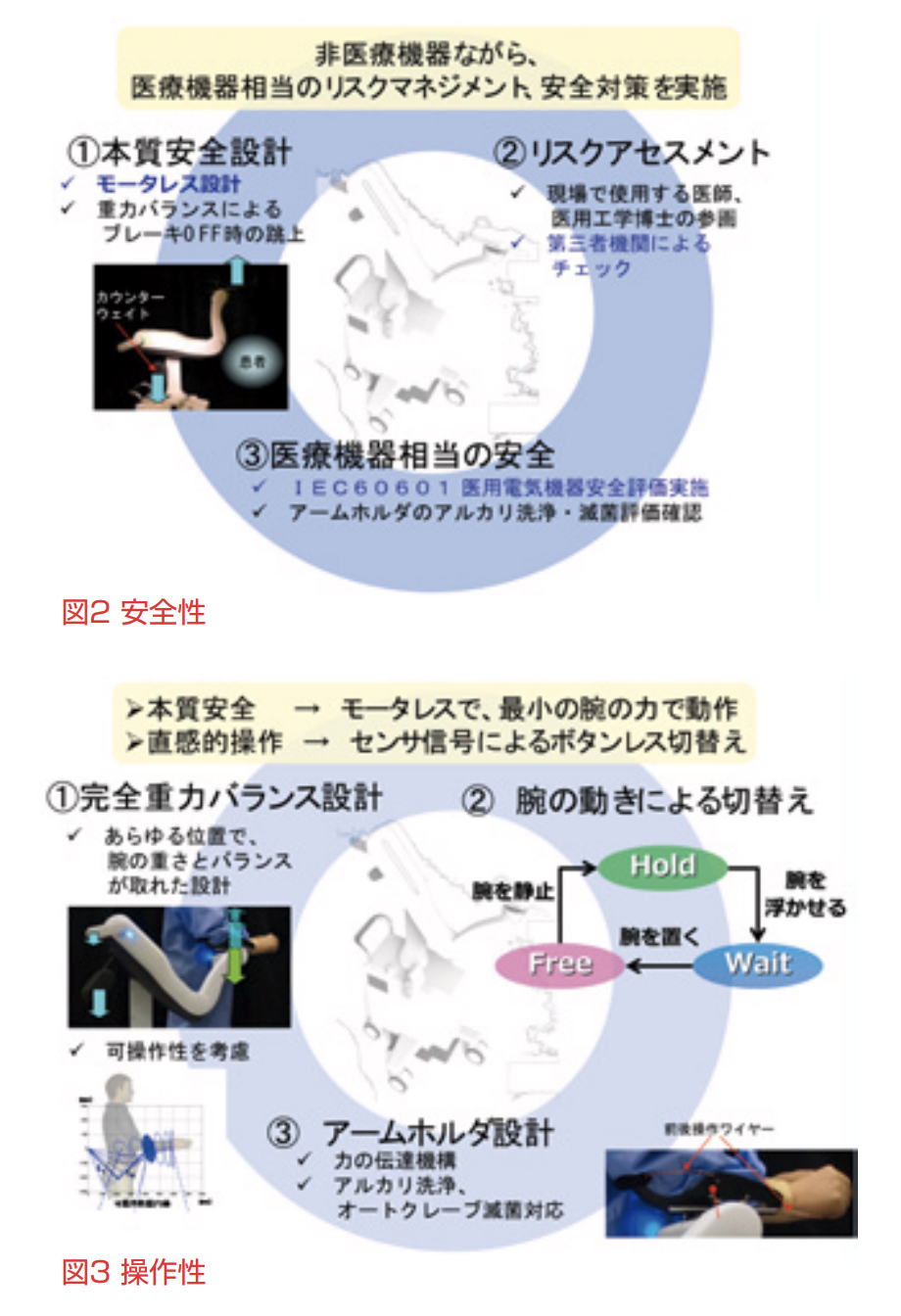
「手術時の、医師の腕のふるえと疲れを低減する」ために、手台は 医師が動かしたい位置に自由に動き、かつ手術時にはきちっと固定 されて台となる必要があります。そのためには、①高い安全性、② 高い操作性を実現する必要があります。 ①において、今回、モータを使用しないパッシブな構造(本質安 全)を採用するとともに、医療現場で用いる機器として、医療機器 相当の安全性を確保するために、ISO14971に基づくリスクマネ ジメントプロセス、IEC60601の医用電気安全評価、およびアー ムホルダ部の洗浄・滅菌評価について、第三者機関のチェックを受 けています。(図2) ②においては、モータ使用しなくとも、医師が疲れを感じないよ うに、重力バランス設計、可操作性を考慮した設計等を行い、軽や かな操作性を実現しています。また、医師の操作意図に合わせて3 つの状態「HOLD: 術中の腕の固定」、「FREE: 台の移動」、「WAIT: 周辺機器操作時の待機」の切替えをセンサで自動的に行 っています。本切替えは、各医師の感性に合わせるため、反応速度 等を調整できるようになっています。(図3)
フィールドテスト/今後の展望
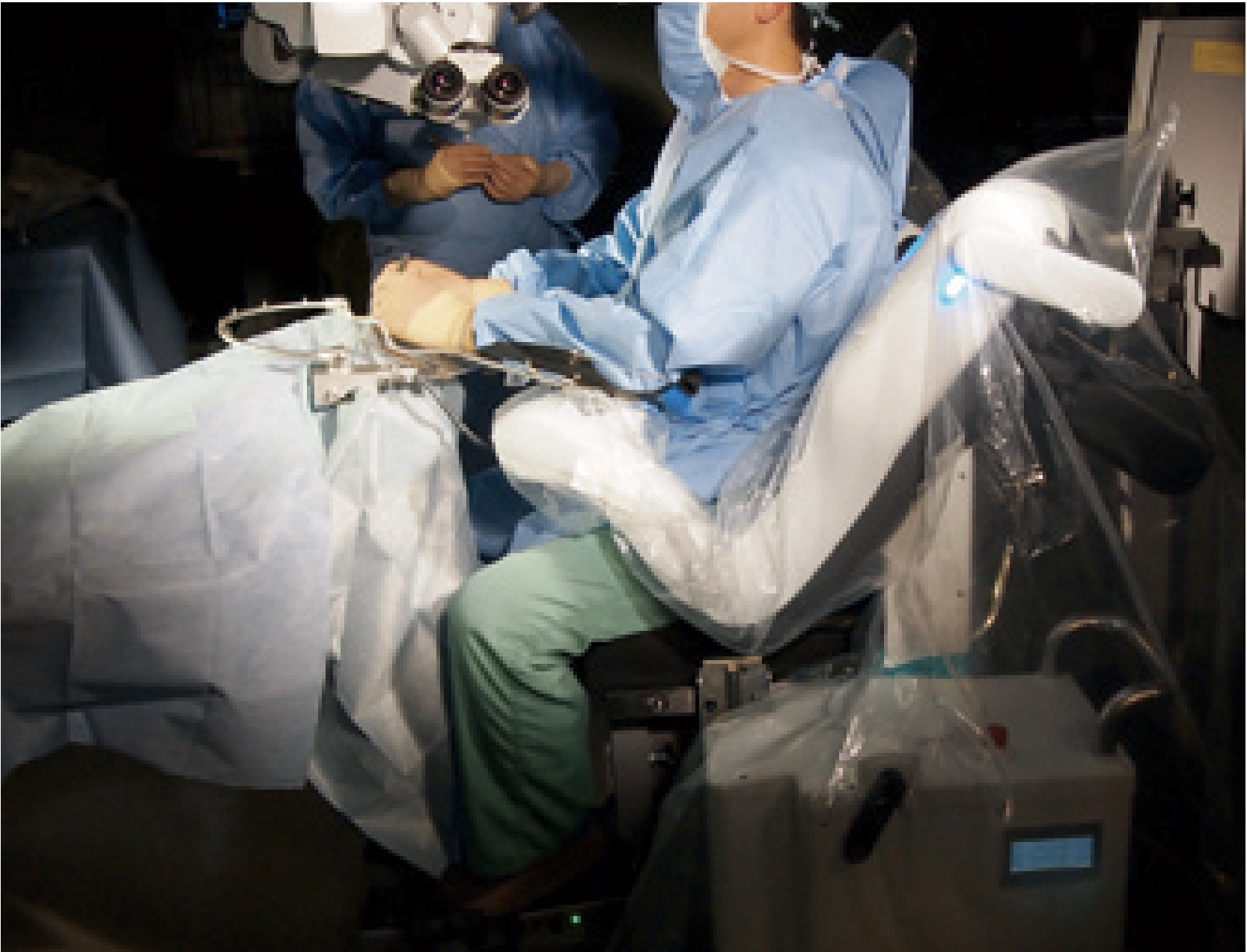
脳神経外科専門医11名による非臨床研究では、手台がふるえを 約70%抑制する効果が報告されています。(グラフ1)また別の研究 のアンケート調査では、疲れの有意な軽減が報告されています。 2013年の非臨床評価では、33名の医師に40回の模擬手術で iArmS®を使用していただき、操作性、機能について高い評価を得 ました。 14年9月5日より信州大学脳神経外科で、さらに10月1日より 同大耳鼻咽喉科において、実際の手術に用いる臨床研究を実施し ています(信州大学倫理委員会の承認を得て実施)。10月1日現 在、15症例実施し、有害事象は報告されていません。(写真2) 今後さらに、国内外3施 設(東京女子医科大学 脳 神経外科、藤田保健衛生 大学 上部消化管外科、米 UCSF 脳神経外科)で順 次臨床研究を行う予定で す。その結果を踏まえ、 15年春に発売を予定し ています。
iArmS®を国内手術で使用していただいた後、国外展開、他診 療科への拡大を図っていきます。さらに、このモータのないパッシ ブな機構を、手術用途以外(産業用途)へ応用を検討する予定です。 今後、これをステップに、医・工・産融合を深め、次なる日の丸手 術ロボットを実現し、我が国のロボット産業活性化に貢献していきたいと考えます。