

ゲンコツ・ロボットシリーズ
[ファナック株式会社]

概要
パラレルリンク構造のロボットとしては類を見ない3軸手首を持つ6自由度構造により、品物の向きを変えて整列させる、ひねるといった、人の手と同じ柔軟な作業が可能なロボット。人の目に相当するビジョンセンサと組み合わせ、これまでロボットの活用が進まなかった食品、医療機器、部品組立等の幅広い分野で活躍する。
評価のポイント
ゲンコツ・ロボットシリーズ
ゲンコツ・ロボットシリーズ/従来にない6軸機構
ゲンコツ・ロボットのネーミングは人間の「げんこつ」に由来します。従来の産業ロボットには見られないユニークな外観、柔らかい曲面を組み合わせたシルエットは、「ゲンコツ」というネーミングの持つイメージ、すなわち緊張感のある力強さを内包しつつ、人の手と指の関係のように微細な作業をこなすロボットに相応しい有機的でやさしい印象を与えるデザインを模索した結果生まれました。 携帯電話や小型機械部品などの精密機器の組み立てや部品整列に適したゲンコツ・ロボット1号、広い作業スペースと大容量6kgの可搬能力、密閉構造で食品などの搬送や整列を高速になすゲンコツ・ロボット3号のラインアップで、従来の多関節ロボットにない特長を活かし、今までロボット化が進んでいなかった新しい分野への適用が急速に拡大しつつあります。
4軸タイプと6軸タイプの2種類の機構のうち特に6軸タイプは、パラレルリンク構造のロボットとしては類のない3軸手首を持つ6自由度構造を実現しています。単なる平面的な品物の移動や整列だけでなく、品物の向きを変えたり、「斜めに嵌める」、「ひねる」といった手首の柔軟性が、精密組み立てを始めとする新しい用途を切り開きました。
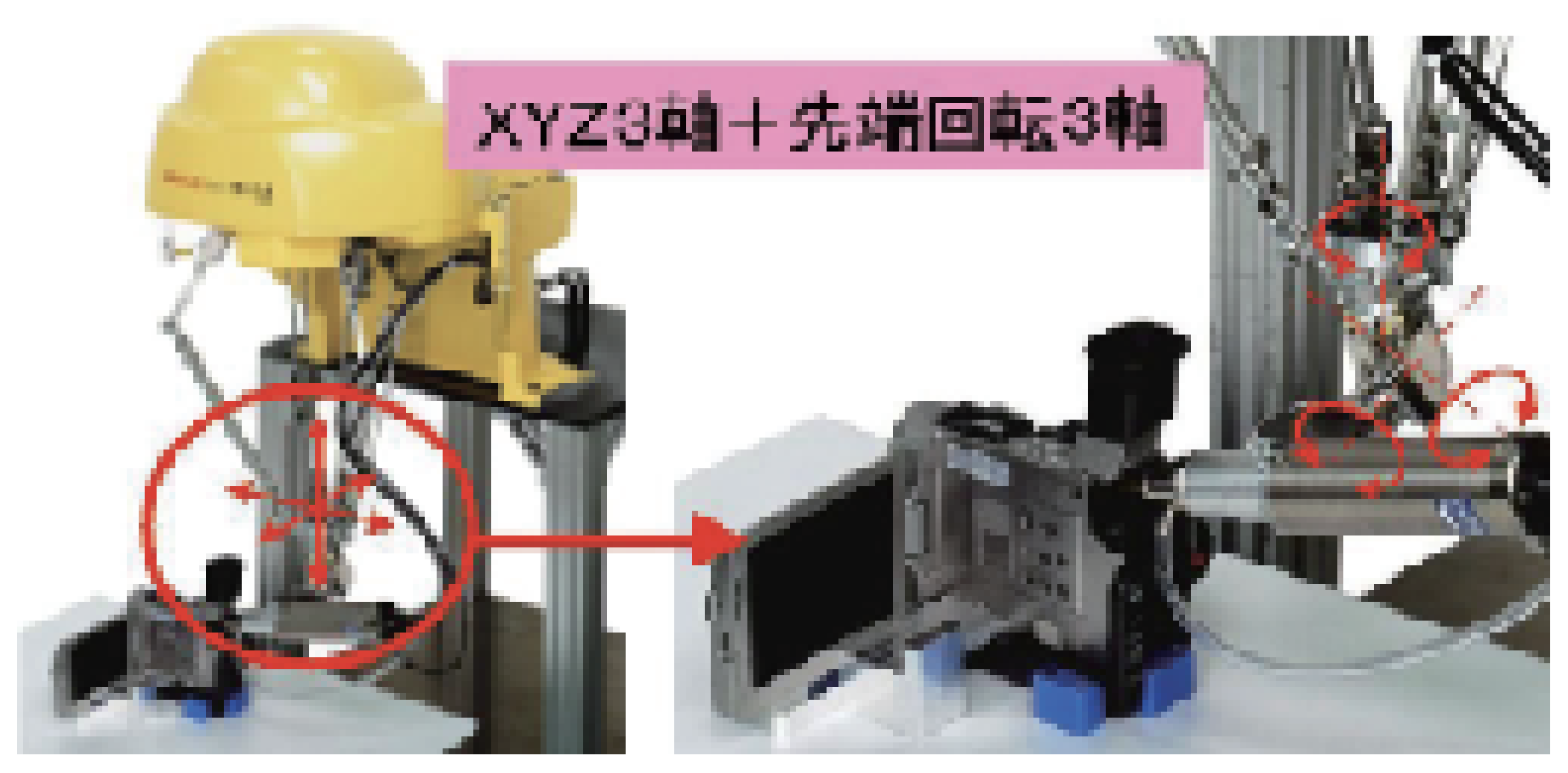
6軸を活かしたねじ締め作業
省スペース
多関節ロボットの導入に二の足を踏んでいた市場の多くは、その理由にロボットが大き過ぎることを挙げています。 ユニークなパラレルリンク機構は一般的な多関節タイプとは異なり、アームの動作エリアがメカニカルに制限されているため、安全動作領域がロボット本体の真下のみに限られます。ラインの安全性の確保が容易になり、省スペースでコンパクトな生産ラインが実現できます。
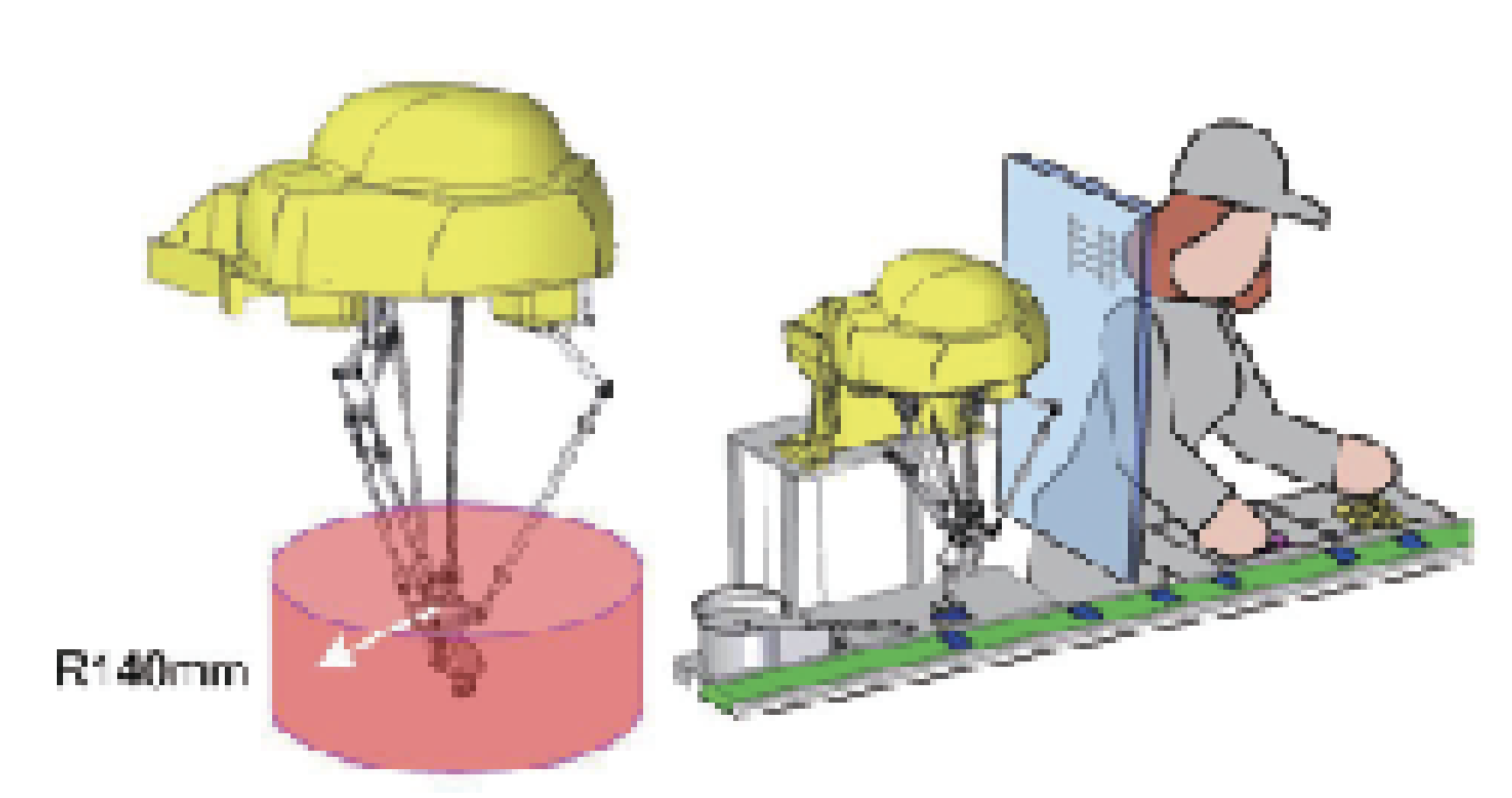
省スペース設置
目を持った知能ロボット/省エネ
カメラを組み合わせ、人間の目に相当する機能を持たせることができます。 手元の様子を認識できるため、品物を予め位置決めしておく必要がありません。作業台に置かれた品物を見つけ、異なる形状の部品の仕分け、良品不良品の検査、文字や色の識別といった高度な知能化作業を行うことができます。 画像処理はパソコンを使用しない内蔵ハードウェアで行うことで、生産設備に求められる高い安定性と信頼性を実現しています。
細くて軽いリンクで先端を素早く動作させる機構は省エネにも大きく貢献します。多関節対応のロボットで必要だった自分自身を動かすためのエネルギーが軽減され、動作時のエネルギーロスが極めて小さくなりました。 また、多関節ロボット数台分の作業を1台でこなす機敏性と相まって、従来の多関節ロボットと比べ、約55%の省エネ効果を実現しています。(ゲンコツ・ロボット1号の場合)
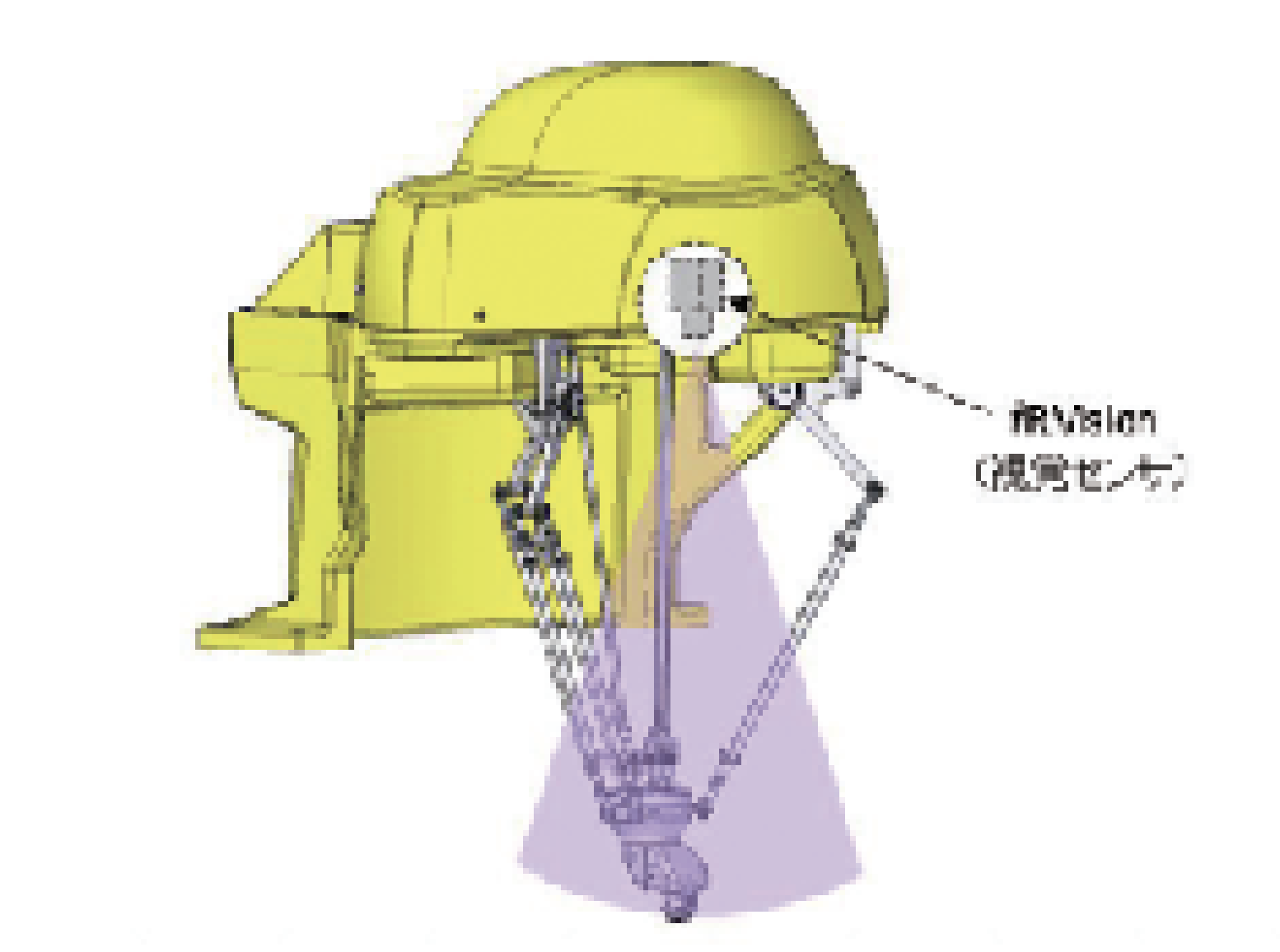
目を持った知能ロボット
超高速動作/今後の展望
手先部にモータなどの動力源を持たないシンプルで軽量なパラレルリンク機構は極めて高い運動性能を発揮します。手先部の最大加速度はゲンコツ・ロボット1号で6G、ゲンコツ・ロボット3号は20Gにも達します。スペースシャトル発射時の加速は3G、F1マシンの加速性能は5Gですから、F1マシンをも凌ぐ超高速動作で、目にも止まらぬ作業が可能です。
多関節型の産業用ロボットは機械製造分野での導入が主流でしたが、全く新しい形態のロボットの登場は、他の様々な製造分野を刺激しました。インスタント食品、お菓子、医療器具、携帯電子機器、腕時計、成形部品、文房具、検査、薬品試験など、あらゆる分野での導入が進んでいます。 ユニークな外観、柔軟で器用な動き、知能を備えたゲンコツ・ロボットシリーズは様々な分野でのロボット化に貢献いたします。