移動ロボット用の小型軽量な測域センサ URGシリーズ
[北陽電機株式会社]

概要
サービスロボットや自動搬送ロボットなど、自律移動が可能なロボットの目となるセンサ。自律移動ロボットは周辺の環境を認識して自身の走行経路を見つけ、人との衝突を回避する安全機能が求められる。測域センサは、ロボット周辺の形状を計測可能なため、これらの解決に最も有用な環境認識センサの一つである。URGシリーズは小型軽量化と低価格化を実現することで、実用的な自律移動ロボットへの搭載を可能にした。
評価のポイント
小型軽量化に成功した国産の高精度環境認識センサ
サービスロボットは人間の生活環境で共存する特長があり、人と の衝突を回避して安全を確保しながら、自分で目的地まで移動す る能力が求められる。 一方、産業用の自動搬送ロボットは工場内の狭い通路を安全に 高速移動して搬送能力を上げることが求められる。 測域センサはこれらの課題解決に最も有効な環境認識センサで あるが、従来は欧米製の重くて大型で高価な物や小型で安価だが 性能の低い産業用センサしかなかった。 URGシリーズは、高精度でロボットに有用な多くの機能を搭載 し、容積比および質量比が従来比28分の1という衝撃的な小型軽 量化を実現した。同シリーズはH17年1月の試作販売を経て、11月の商品発売 以来、累計で4000台超の販売実績がある。 富士重工業(株)の掃除ロボット、綜合警備保障(株)の警備ロボッ ト、大阪市生野区の村田病院で稼動している入院患者見守りロ ボット、清水建設(株)の車椅子ロボット、 レスキューロボット、半導体 ウェーハ搬送ロボットなどに採用されている。

小型化・省電力化・低価格化
従来の類似するセンサに比して、今回商品化したURGシリーズ は、小型軽量化を実現し、加えて省電力化と低価格化も実現した。 これまでユーザは、 この種の測域センサを小型の移動ロボットに 搭載することは現実的ではないと考えられていたのに対し、言わ ば、技術者のパラダイムに変化を与えた。 本センサは、国内外 のロボット開発者に大 きな影響を与えてお り、マニピュレータや 二足歩行ロボットへの 応用など、従来の欧米 製の測域センサでは 考えられなかった新たな応用分野への研究が広がり始めている。 また、実用的で利便性の高いコマンド体系と、スキャナ同期出力 やUSBインタフェースなどの自律移動ロボットに有用な機能を備 えていることもユーザの支持を得ている大きな理由の一つであ る。
ロボットに最も有効な環境認識センサを目指して
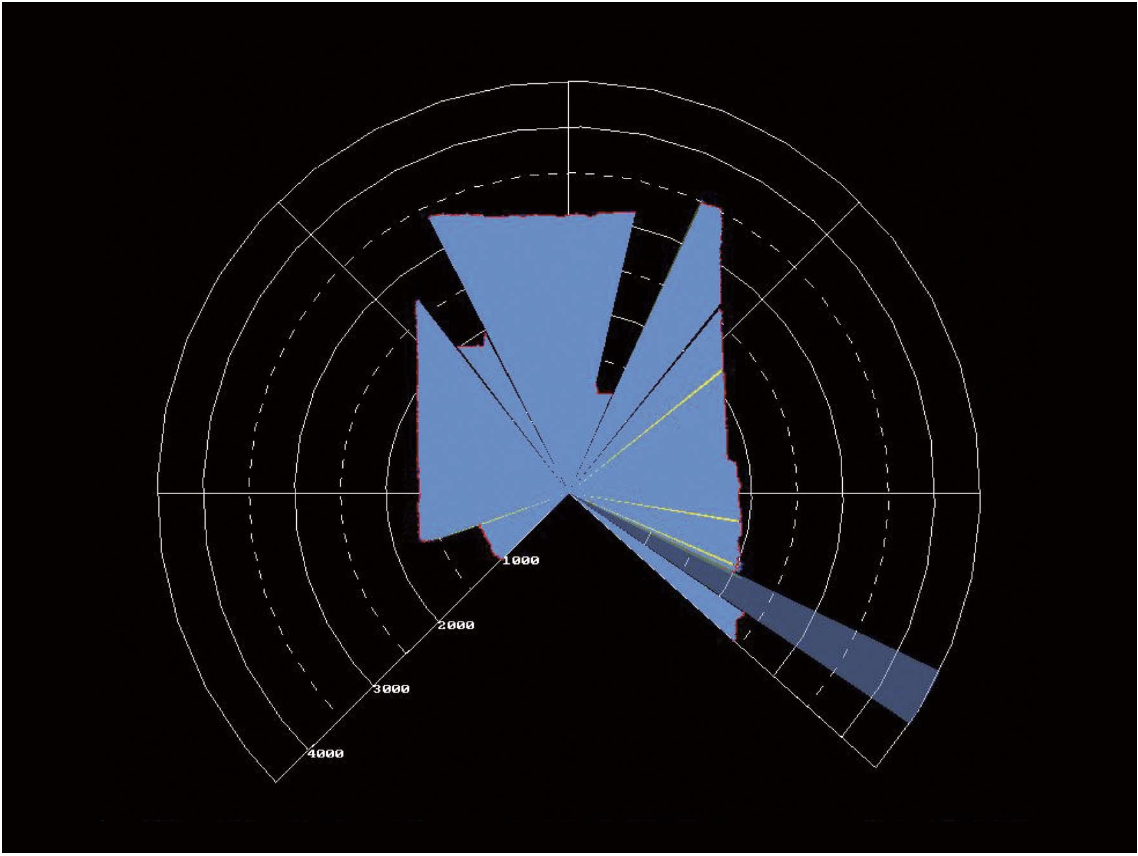
測域センサ(Scanning range sensor) は自律移動ロボットに 最も有効な環境認識センサと言われてきたが、 これまでは欧米製 のものしかなく、国産の高精度で低価格な製品がのぞまれてい た。そこで北陽電機(株)は中小機構のH15-17戦略的基盤技術力 強化事業の下、自律移動ロボット研究の筑波大学や自律巡回型警 備ロボット開発の綜合警備保障(株)などとコンソーシアムを構成し て、自律移動ロボットが実用的に搭載可能な小型軽量の測域セン サを開発、商品化した。 開発当初の測距範囲(レンジ)は、掃除機ロボットのような一般 家庭で稼動するロボットを想定し、1.5mであった。 しかし、 ロボット インテグレータへのリサーチを重ねた結果、多少の容積増加を犠 牲にしても、 レンジを伸ばす方がより多くのロボットに利用できる ことがわかり、 レンジを4mに上方修正して取り組むことで、結果的 に多くのユーザの支持を得ることができた。 技術的な課題としては、安全(レーザ)、高精度で小型軽量、 しか も安価であることであった。これらをクリアする当初の開発計画と しては、測距原理に位相差測距方式を採用し、 ミキサ回路を使った アナログ検波とそれらのIC化でした。しかし、開発を始めて1ヵ月 後に必要なアナログ回路のIC化が現在の半導体技術では非常に 困難であることが判明し、開発計画が根本から崩れてしまった。そこでダウンコンバートサンプリングによるフーリエ変換という 全く未経験なデジタル検波方式に挑戦せざるを得なくなった。度 重なる失敗と創意工夫により、同方式の基盤技術を確立したことで IC化にも成功して、小型化することができた。 一方、開発を始めて2ヵ月後には、IECのレーザ安全基準が改定さ れていることが判明し、そのままではレンジが半分以下になり、ロ ボットが利用できる実用的な測域センサにならない問題に直面した が、 試行錯誤の上、 バースト発光の適用によりこの問題を解決した。2005年に愛知県で開催された、愛・地球博においては、 実用化に 向けた実証実験として採用された各種ロボットにおいても、環境認 識センサとして、 北陽電機の測域センサが数多く採用された。