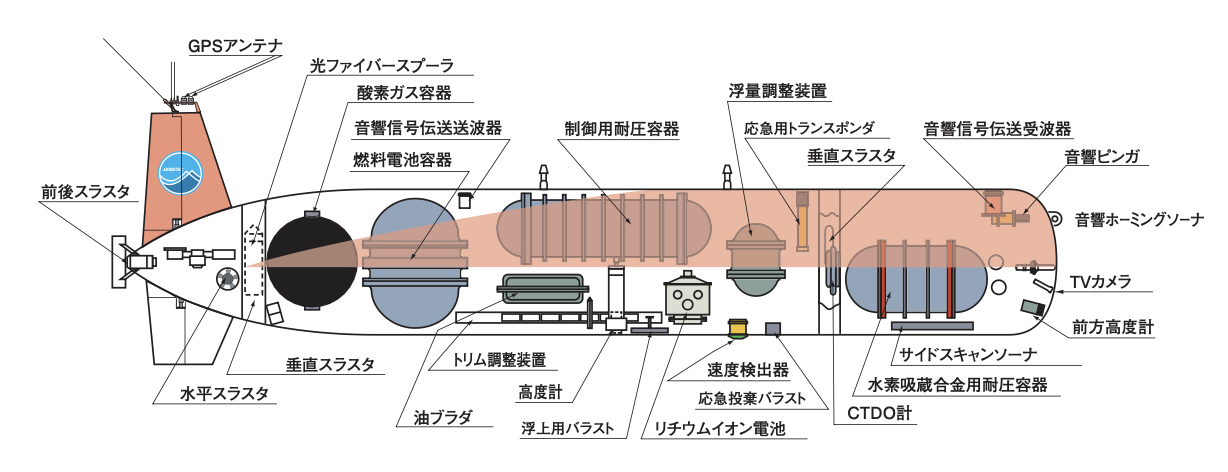
深海巡航探査機 「うらしま」
[深海巡航探査機 「うらしま」 独立行政法人海洋研究開発機構]

概要
深海巡航探査機「うらしま」の開発には、過酷な環境である深海において、確実に探査活動を実現するための、測位および動力源など独自の技術開発が不可欠。このため、慣性航法と音響航法を融合して深海での長時間潜航を実現し、また、エネルギー貯蔵には水素と酸素から発電する閉鎖式燃料電池の使用を深海ロボットとして初めて実用化した。
評価のポイント
地震国として重要な深海底探査/海中での通信制御技術開発
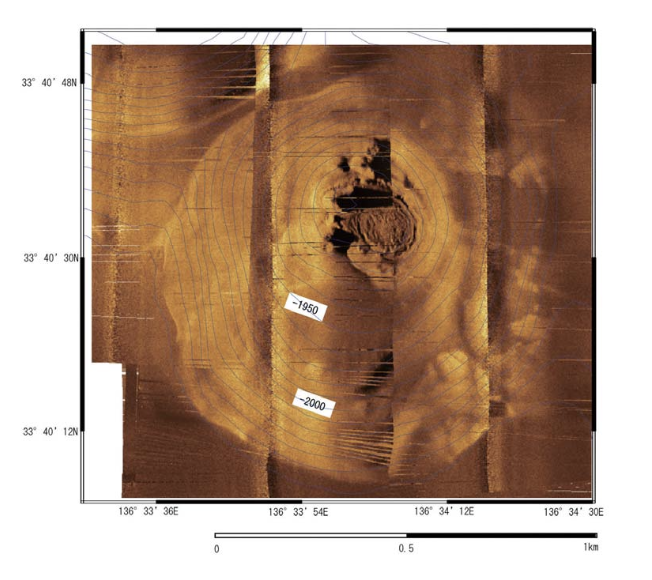
深海底の詳細地形図は作成されていない。特に四方を海に囲ま れたわが国の周辺は水深が深いだけでなく、複数のプレートが複 雑に衝突する世界的にも珍しい地形である。このため、東南海や南 海では海溝型の大地震が繰り返し発生しており、深海底の精密探 査は地震との関係を研究するために不可欠と考えられている。 平成17年度の「うらしま」の潜航試験は伊豆半島東方の海域 と、三重県尾鷲市沖の熊野トラフでそれぞれ精密探査を試験的に 実施し、取得した音響探査データから海底の微細地形と海底下表 層の微細構造を明らかにすることができた。また、熊野トラフには次世代のエネルギ資源であるメタンハイド レードの埋蔵を予見できる泥火山噴出口の内部構造を詳しく見る ことができた。 これらの微細地形等 の計測技術が確立すれ ば、将来にわたって繰り 返し同じ海底の探査を 実施して時間的な変動 の解明にも貴重なデー タを提供することがで きる。
海中は陸上のように海中では電磁波が伝播しないため、測位お よび通信制御技術のさまざまな分野において、独自の技術が不可 欠である。 「うらしま」ではこれらの技術課題を解決し、熊野トラフ のサイドスキャンソナー記録では、円形構造のより詳細な起伏が 識別されたとともに、円形構造の西側半分を取り囲むように小丘 が多数分布し、東側は長波長の畝状構造で縁取られることが明ら かになった。 今までの「しんかい6500」などによる海底観察結果と総合する ことにより、泥火山の正確で詳細な構造の把握と形成過程の理解 が進むものと考える。
長時間の自律航行を目指して
従来からエネルギ密度の高い海中エネルギ源の研究と実用化 が各国で行われてきたが、 「うらしま」では深海の環境圧で利用で きる均圧式2次電池の開発に成功した。 従来の電池よりも保守と維持費が軽減されるため、均圧式リチ ウムイオン電池は「しんかい6500」にも採用された。 燃料電池に不可欠な水素ガスは可燃ガスであり取り扱いには注 意を要する。 「うらしま」では水素を低圧で安全に貯蔵するために、 水素吸蔵合金を採用した。水素吸蔵合金からの水素放出は吸熱反応であり熱を供給するために、燃料電池の排出する熱を用いたコ ジェネレーションを採用して解決した。 航行中に機器に異常が発生した場合は、状況を判断する機能を 有する。航行が不可能な場合には、直ちに潜航を中止して海面に 浮上する。二重の浮上機能を装備し浮上位置は衛星通信を介して 自動的に通知される。
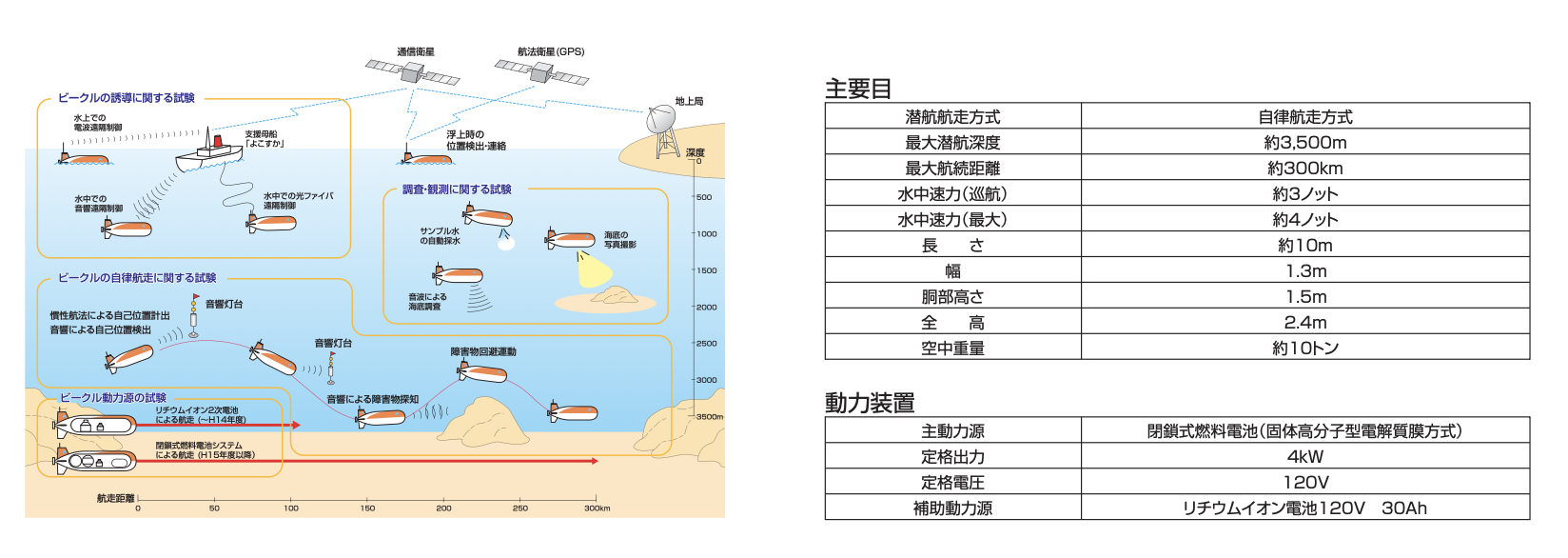
深海における独自の位置計測の確立
平成10年度に建造された深海巡航探査機「うらしま」(以下 AUVと称す)は平成12年度から海中測位技術と運動制御ソフトを 確立するための海域試験を繰り返してきた。海中であらかじめ指定したコースに沿って航行させるためには、 位置の計測と運動の制御が課題になる。海中は電磁波が伝わらな いので、GPSなどの衛星航法を利用できない。 このため、慣性航法と音響航法を組み合わせて海中の長時間の 正確な位置計測を確立した。時間と共に増大する慣性航法の誤差 を抑制するために、 リングレーザージャイロなど最先端の技術を導 入すると同時に、速度計など航法計器と組み合わせて精度の向上 に努めた。 さらに海底に設置した音響灯台を基準点として、慣性航法に蓄 積した誤差を修正する機能を持たせた。AUVは航空機と同様に3次元空間で運動する。AUVの水平面 運動は慣性航法で計測した 位置があらかじめ設定した コースに一致するように、プ ロペラと舵を制御して航行 する。鉛直面の運動は海底から 計測したAUVの高度または 海面から計測したAUVの深度のいずれかを選択し、設定した目標値に追従するように制御する。この水平と鉛直面での運動を同時に制御して航行す る機能を持たせた。この結果、平成14年にリチウムイオン電池を エネルギ源とする自律航行に成功した。 この間に陸上では、次世代の海中エネルギとして期待される閉 鎖式燃料電池について海中を模擬した環境で試験を行い、低温か つ高環境圧での課題解決に目処をつけた。 閉鎖式燃料電池を搭載したAUVは平成17年2月末の自律航走 試験で目標の300kmを越える317kmの世界新記録を樹立し、深海探査を実現するロボットとしての基盤技術の研究に成果を納 めた。 H17年度以降、 リチウムイオン電池を搭載して海底の精密探査 を実施ながら、複雑な海底面をなめるような運動制御を実現する 技術研究を実施している。 潜航を重ねるたびに着々と未踏の深海を広域かつ詳細に探査す るロボットへと変貌を繰り返している。