

イチゴ収穫ロボット
[独立行政法人農業・食品産業技術総合研究機構 生物系特定産業技術研究支援センター/ エスアイ精工株式会社]

概要
ハウス内栽培されたイチゴを3次元位置測定し、色味具合・熟度をカメラで判定し、果実を傷つけないよう果柄部分を切断しトレイに収容するロボット。夜間にロボットが収穫作業を行うことで、農家の作業負担を軽減できる。
評価のポイント
世界が注目、イチゴ収穫ロボット
収穫ロボットの構成
イチゴ収穫ロボットは、マニピュレータ、マシンビジョン、採果ハンド、トレイ収容部、走行部から構成され、長さ1.7m、幅0.6m、高さ1.9mです。イチゴハウスを移動しながら赤いイチゴを見つけ出し、自動で収穫していきます。 ①マニピュレータ 3自由度の円筒座標型マニピュレータを利用しています。 ②マシンビジョン マシンビジョンはLED照明5灯とCCDカメラ3台から構成され、両側のカメラ2台によりステレオビジョン処理が行われ果実の位置と着色度を測定します。中央カメラにより果柄の切断位置と傾きを推定します。画像を入力する時のみLEDが点灯します。 ③採果ハンド 採果ハンドはマニピュレータの先端に取り付けられ、果柄を切断するフィンが、および果実を検知するセンサから構成されています。フィンの先端に隙間を設けることにより、別の果柄を切断しないようにしています。 ④トレイ収容部 収穫した果実を入れるトレイを格納するスペースがあります。空トレイを1箱ずつ取り出し、収穫して満杯になったら収容部に戻します。 ⑤走行部 イチゴ栽培ベッドの通路方向に移動するフレームと横方向に移動するテーブルから構成され、ロボット本体を搭載してハウス内を移動します。

果実に傷つけず果柄を切断して収穫
農家さんに使ってもらうための実用性の追求
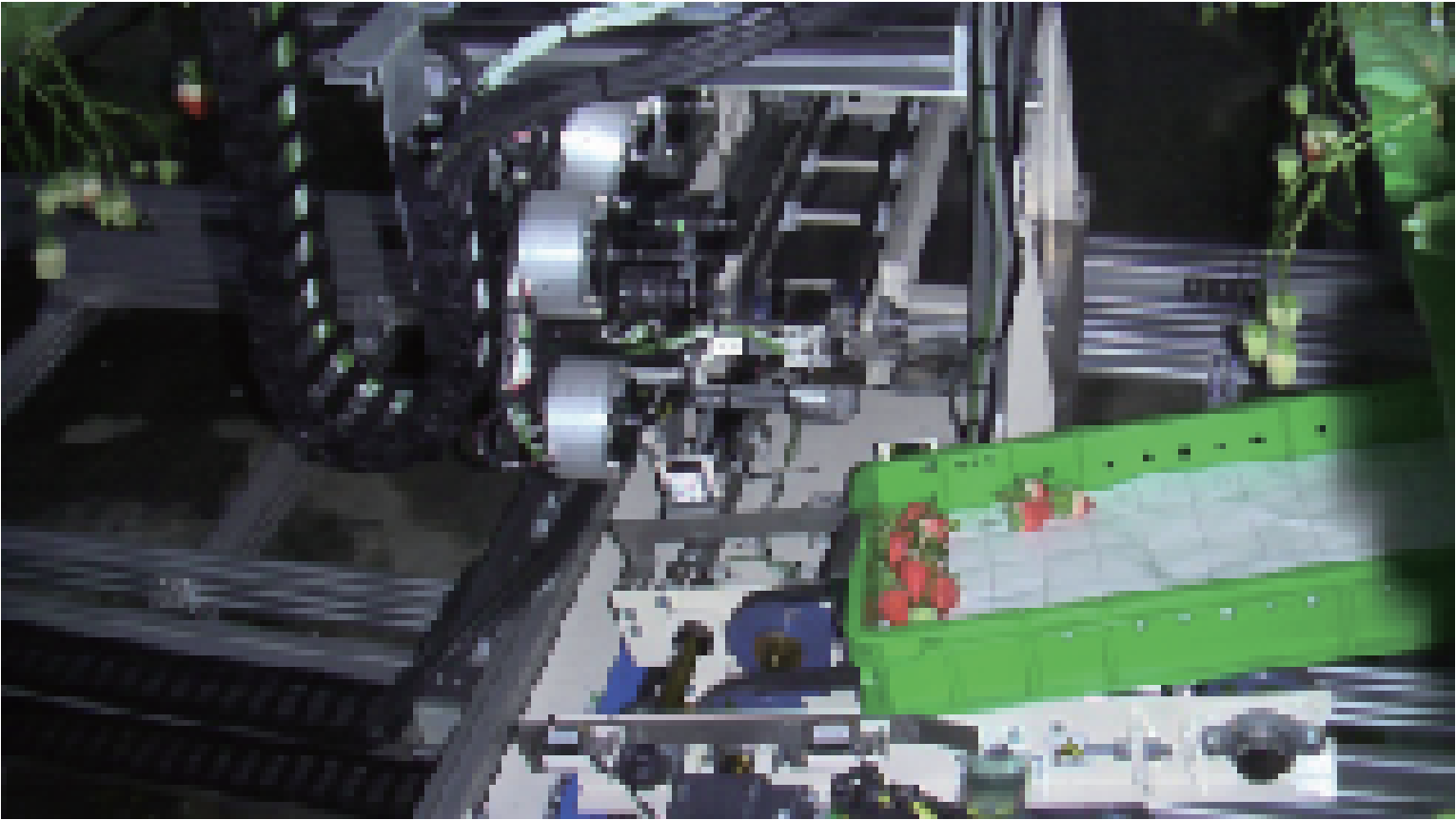
①着色度の判定 熟練した農家さんの目に負けないように、果実の色味具合を判定する機能があります。一般には8分着色以上であれば収穫に適しています。この基準値は、農家さんの判断で変更できるようになっています。 ②果柄の検出と把持 イチゴはとても柔らかいため、果実に触れると傷みが心配です。傷つけないように果柄を持って摘み取ります。 ③トレイへの収容と運搬 収穫した果実をトレイに順次収容していきます。満杯になったら次のトレイが準備されます。栽培ベッド1列の収穫が終了すると果実トレイを排出し、空トレイを受け取って次の通路に入っていきます。
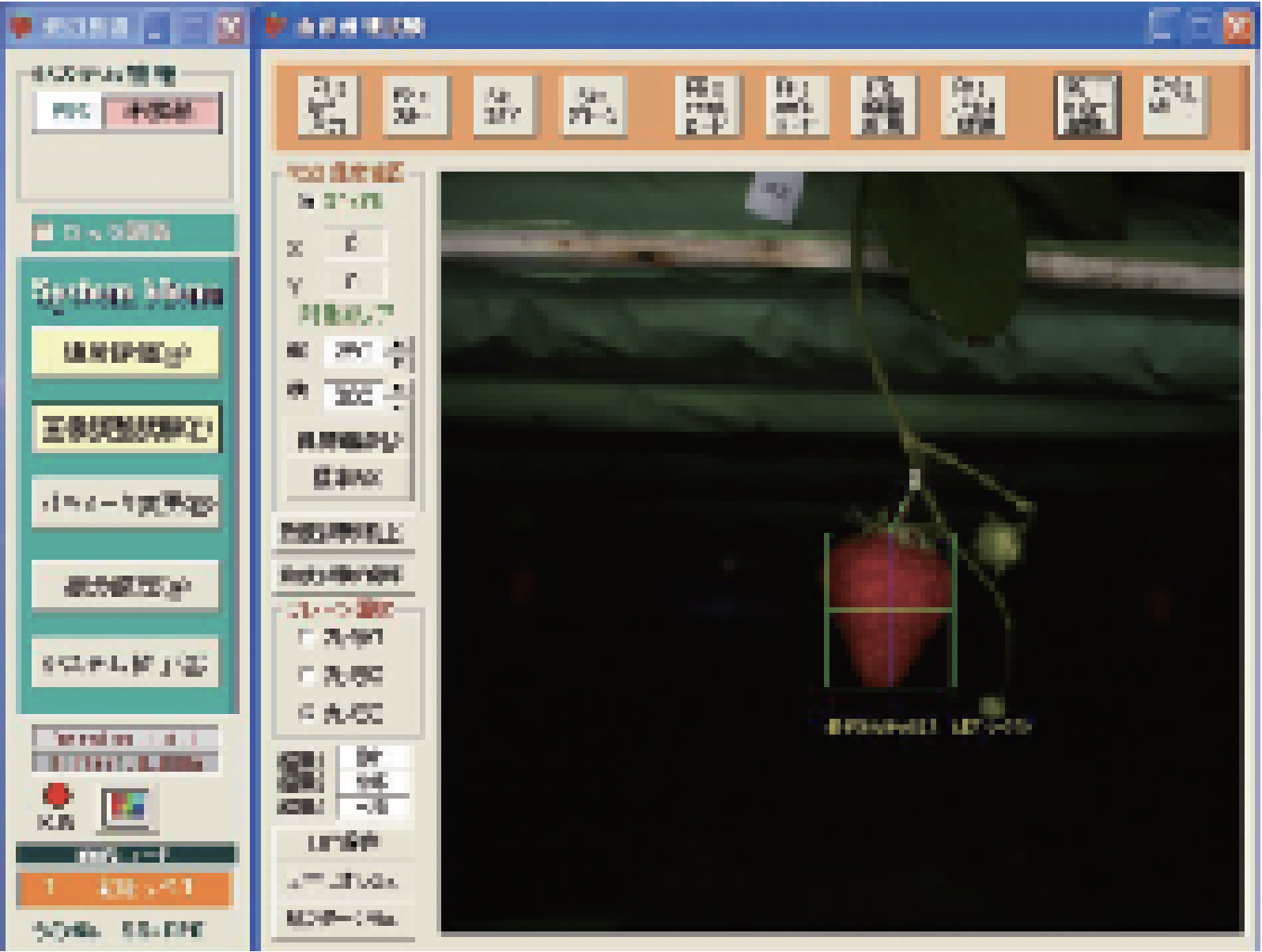
収穫ロボットの操作画面
イチゴハウスでの動作
収穫ロボットは、ホーム位置を起点として、横移動しイチゴ栽培ベッドの通路に入っていきます。前進動作で通路右側の果実を順次収穫します。通路終端で機体を180°旋回させ、後進しながら通路左側の果実を収穫します。 収穫の詳細な動作は以下の通りです。走行部が停止した状態で採果を行います。 ①2台のステレオビジョンカメラにより果実の3次元位置を計測します。 ②検出した果実の着色度を推定し、収穫するかしないかを判定します。 ③収穫しようとする果実に向きなおし、中央のカメラで果実を撮影し、果柄の切断位置と傾きを求めます。 ④採果ハンドは、果実の傾きに応じて左右に回転して、果柄の切断位置に接近します。 ⑤グリッパで果柄を切断し、果実が把持できていることを確認して、トレイに収容します。

トレイを準備してイチゴの通路に進入
収穫性能と利用方法
ロボットといっても人間と同じ能力を持っているわけではありません。基本性能は以下の通りです。 ①適熟果実の収穫割合:60〜65% ②サイクル時間(果実1個の収穫処理):9秒 イチゴ収穫ロボットは主として夜間稼働します。人間に比べサイクル時間が遅い分、夜間にゆっくり確実に作業を行います。夜間に稼働することで、照明条件が一定になり果実を見つけ易くなります。また、夜間は果実の温度が低いため、表皮が堅く傷つきにくくなります。新鮮なイチゴを消費者に届けることができます。 収穫精度が60〜65%ですから、採れなかった果実は翌朝に農家さんが収穫しなければなりません。しかし、農家さんにとっては寝ている間に約2/3の作業を済ませてくれるので、大変助かります。
夜間の収穫作業