

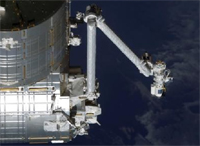
「きぼう」ロボットアーム
[独立行政法人宇宙航空研究開発機構(JAXA) 日本電気株式会社(NEC)]
概要
国際宇宙ステーションの一部である日本宇宙実験棟「きぼう」に取り付けられた宇宙用ロボットアーム。「きぼう」船内から宇宙飛行士がロボットアームを遠隔操作し、スペースシャトルで打ち上げられた実験用機材などの宇宙ステーションへの取り付け作業を行う。
評価のポイント
宇宙空間という特殊な環境ながらも、有人宇宙ステーションのそばでも安全で確実な運用をできる点が評価された。また、今回の応募期間中に計5台の実験用機材の取り付けを完了し、わが国の技術力を海外に示した実績も評価され、「日本科学未来館館長賞」の受賞となった。
日本初の実用宇宙ロボットアーム
国際宇宙ステーション(ISS)/「きぼう」
国際宇宙ステーション(ISS)は日本、米国、ロシア、欧州、カナダの世界15カ国が協力して、地上約400km上空に建設された、人類史上最大の有人宇宙施設です。その大きさは約108.5m×72.8mとほぼサッカー場ほどの大きさとなり、質量は約420トンにもなります。「きぼう」日本実験棟は、ISSの一つとして、2009年7月に完成しました。「きぼう」は、これまで我が国の無人の人工衛星では成し得なかった実験インフラの提供、実験装置や生物試料の補給・回収・修理などを可能とし、宇宙利用方法の革新、裾野の拡大などに貢献するものです。「きぼう」には、微小重力、高真空などの宇宙環境暴露環境を利用した科学観測、地球観測、通信、理工学実験及び材料実験などを実施できる船外実験プラットフォームがあります。船外実験プラットフォームにはそれぞれのミッション目的を持つ実験ペイロードを合計12箇所に取り付けることが可能です。
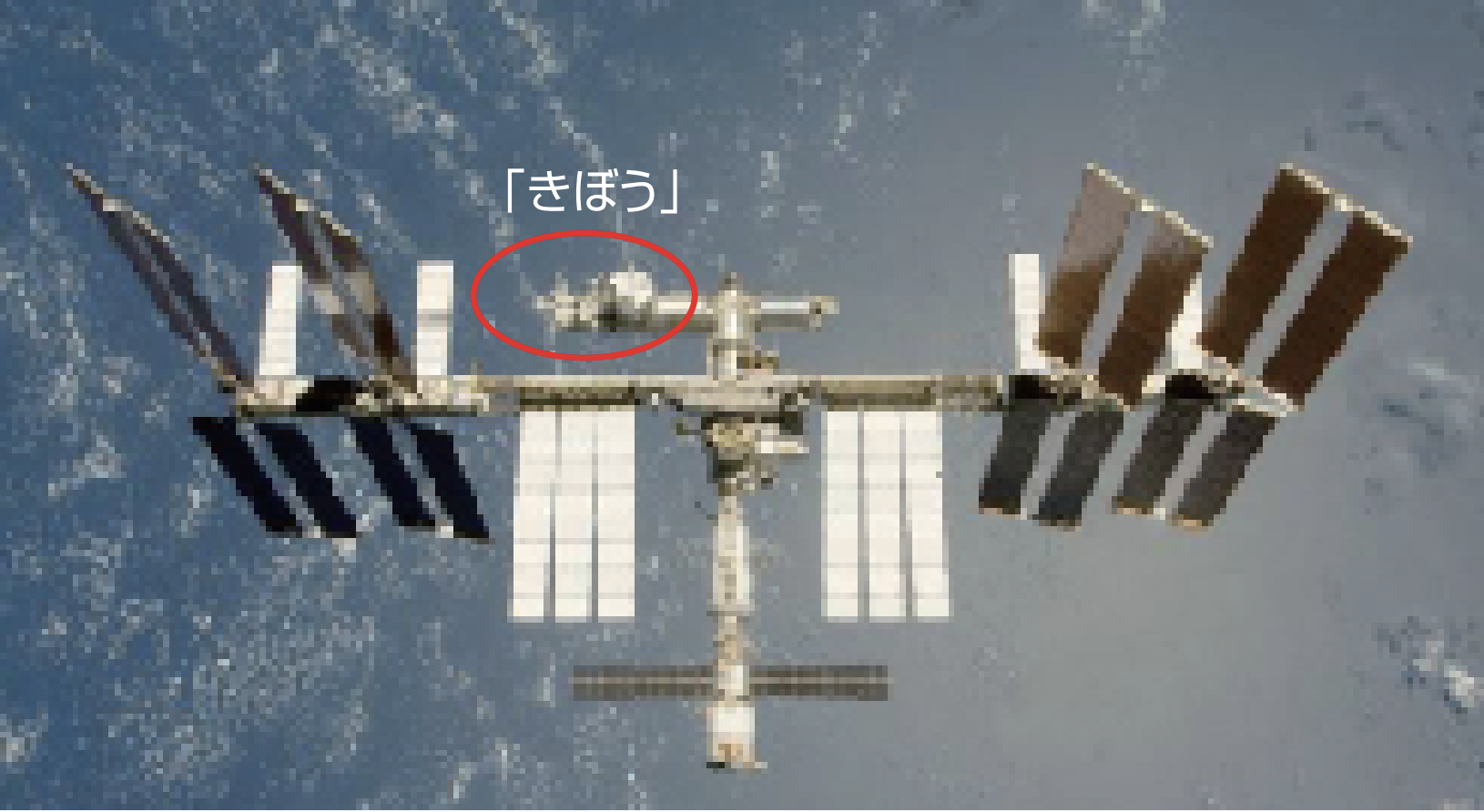
国際宇宙ステーション(ISS)の軌道上概観
目的と構成/特徴
「きぼう」ロボットアームは、宇宙飛行士の船外活動を支援または代行するもので宇宙飛行士の負荷とリスクを軽減します。 「きぼう」ロボットアームは、全長約10m、質量780kgの6自由度アームで、船内実験室に設置されている操縦卓から宇宙飛行士により操作されます。
有人宇宙施設「きぼう」でサービスを提供する宇宙ロボットとして、地上ロボットや無人宇宙ロボットと比較し、以下の特徴を有しています。 ①打上げ重量の軽量化に対する厳しい要求のため、剛性が低くなる特徴があり、特に制御系解析では柔軟性を考慮しています。また地上で試験する為には、重力でアームが破壊することを避けるため、空気ベアリングで浮上させた治具で支持し、定盤上で二次元動作を確認しました。地上試験では確認できない三次元の動作は、試験結果を反映させた数学モデルを用いた解析で確認しました。 ②打上げ時の厳しい機械環境、軌道上の厳しい熱環境に耐えるよう開発しました。打上げ時にはその厳しい荷重に耐えるようアームを基部取付部と3カ所の保持解放機構で支持し、軌道上で解放しました。また、軌道上の厳しい熱環境に耐えるよう、多層断熱材や放熱用の銀蒸着テフロン及びヒータ(※ここで文が途切れ) ③軌道上の熱真空環境で動作できる潤滑として、関節機構部の歯車に二硫化モリブデン焼成被膜、軸受に二硫化モリブデン(…)、リブデンスパッタリングによる固体潤滑を採用しています。 ④「きぼう」ロボットアームの機器を宇宙飛行士の船外活動又は船内活動で交換することにより、保守が可能です。 ⑤船内実験室に設置した操縦卓は、無重力環境下での宇宙飛行士の中立姿勢や視線のスキャンパターンを考慮し、良好な操作性を提供しています。

ユーザの視点にたった良好な操作性/有人宇宙プログラムに適合する安全性・保全性
スペースシャトルマニピュレータとカナダの国際宇宙ステーションロボットアームとの操作上の共通化を行いました。特に、ハンドコントローラや、コマンディング・テレメトリ監視を行うラップトップ画面、操作で使用する運用座標系の定義、運用モード等で共通化を実現しています。フライト品完成後は定盤上で実際にアームを動作させ、宇宙飛行士も参加して操作性を評価しました。共通化設計により訓練リソースの低減、ミスオペレーションの低減を実現しています。
ロボットアーム動作中の有人施設への衝突やハンドリングしている実験装置の不慮の放出に対して二重の故障が発生しても、安全を確保する設計となっています。更に、アームに故障が発生し停止しても、故障部位を交換できるよう6関節とも共通の設計となっています。また、操縦卓の故障に備え、バックアップの操作卓を使用し、危険な状況を回避します。

定盤上でのアームの操作性評価試験
運用実績/今後の計画
2008年6月に「きぼう」ロボットアームは船内実験室に固定された状態でスペースシャトルにより打上げられました。1年間に互る軌道上チェックアウト及び性能データ取得後、2009年7月に打ち上げられた実験装置等3体を船外実験プラットフォームへ取り付けました。その後、2009年9月、種子島宇宙センターから打ち上げられたHTVに搭載された実験装置2体の取り付けを完了し、2010年11月現在、5種類のペイロードが地球観測・天体観測等のミッションを行っています。
今後、少なくとも2020年までの運用期間に適宜打ち上げられる様々な観測・実験装置の取り付け作業を行い、継続的に「きぼう」の運用利用ミッションの支援を行う計画です。 また、「きぼう」ロボットアームの開発、及び軌道上運用を通して得た技術成果は、今後、デブリ衛星回収、衛星の軌道上保守、月・惑星の宇宙探査ロボットなどへの発展が期待できます。
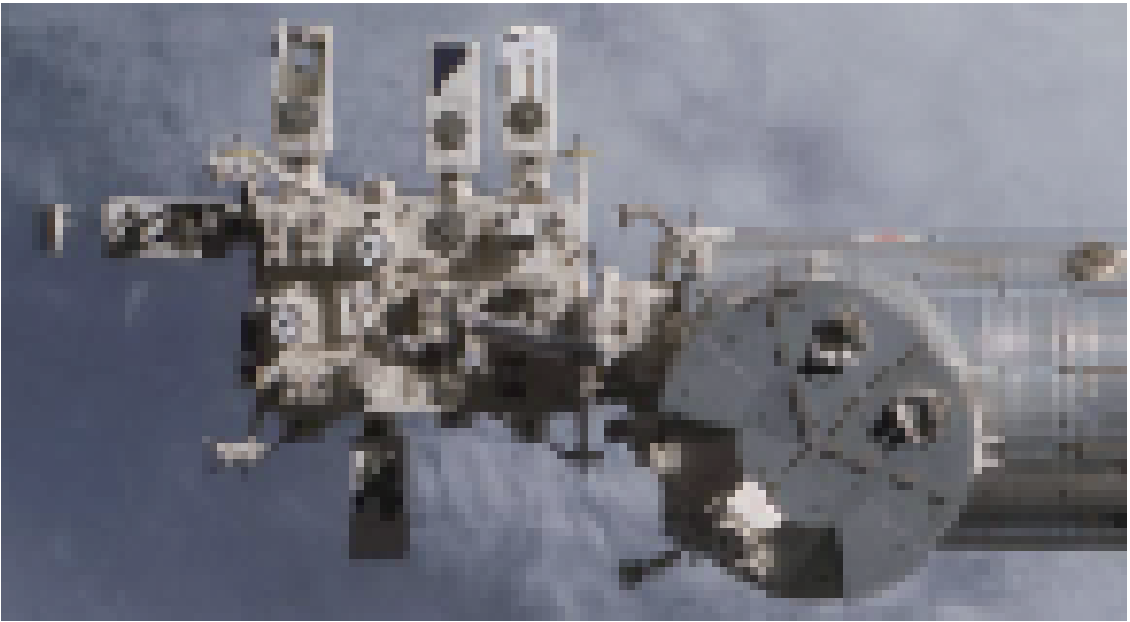
移設した実験装置と「きぼう」ロボットアーム