

能動スコープカメラ
[東北大学 国際レスキューシステム研究機構]

概要
がれきの中など、人が入れない幅3cm程度のすきまを、8mまで進入し、内部の映像を取得できる探索ロボット。ケーブル部の繊毛の振動により前進し、手元でねじることにより進行方向を変えられる。実際に、2008年1月には、米国の倒壊事故の原因調査に用いられ、内部の情報収集に成功しており、今後の実用化が期待される。
評価のポイント
能動スコープカメラの特徴
能動スコープカメラは、倒壊建物内に取り残された要救助者 を捜索することを目的とした、狭所探索用レスキューロボット です。独自の推進機構で幅3cm程度の狭路を能動的に奥深 くまで進入し、先端のカメラで映像情報を収集することがで きます。 従来のファイバースコープやビデオスコープは、後方から ケーブルを押し込むことによって、先端を狭路内に挿入して いましたが、ケーブルが柔軟なため、検索可能な深さが多く の場合1~2 m程度にとどまっており、段差や登り勾配がある と奥には進めない、などの問題点がありました。この問題を解 決するには、ビデオスコープを能動的に動かす必要がありま す。そこで、ビデオスコープに繊毛振動型駆動機構を搭載し た能動スコープカメラを開発しました。繊毛振動型駆動機構 は、金属あるいは樹脂製の細い繊毛に振動を加えることで推 進力を得る機構です。能動スコープカメラの挿入部には傾い た繊毛が植え付けられており、モータの振動により接触面と 固着,滑りを繰り返して前進します。これにより、段差や勾配を 踏破することが可能になり、従来のビデオスコープでは進入 できなかった場所等、より広域な環境の探索が可能となりま した。実用性 能動スコープカメラに搭載されている首振り機構により、 挿入部の先端数cm を上下左右に曲げることができます。 また、挿入部を手元でねじるという操作(ケーブルの剛性や 推進力を利用しています)によって、平地や分岐部での方 向転換が可能です。 簡便性 上述の方向転換のように、能動スコープカメラの操作方法 は複雑なものではありません。そのため誰でも短時間の訓 練によって容易に操作方法を習得し、使用することが可能 です。 安全性 エネルギーが小さく、配線やモータが密閉されています。 40度を超える環境下(米国Disaster City)での数日間に わたる試験でも、信頼性高く動作することが確認されてい ます。 性 能 防水加工を施しているため、水中でも推進可能です。また、 条件が良い場合、最大20cm程度の段差を乗り越えること ができ、20度以下の緩やかな上り勾配も移動することがで きます。コンクリート面での最高速度は46.7mm/sです。
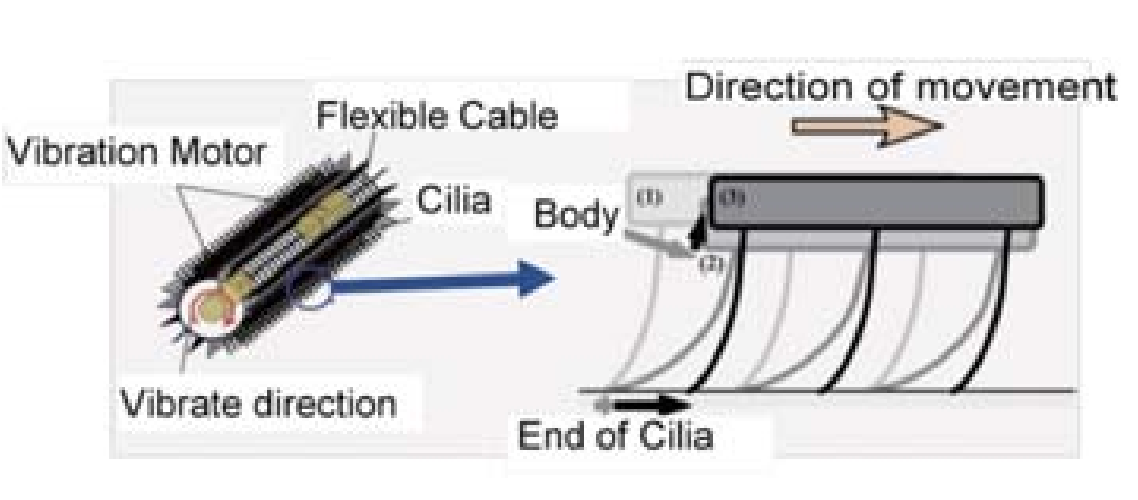
繊毛振動型駆動機構の原理
実績
能動スコープカメラは消防、警察、FEMAなどのユーザから 高評価を得ています。これまでに、災害現場での適用可能性 を検証するため、国際レスキューシステム研究機構神戸ラボ ラトリーの倒壊家屋実験施設において検証実験を行いまし た。当該施設は災害で倒壊した木造家屋を模擬しており、木 材や家財用品などが散乱した状況が作られていました。実験 は2名で行い、1名が能動スコープカメラを操作(ねじり、押し 込み、引き抜き、先端の曲げ)し、もう1名がカメラ映像を見な がら操縦者への指示を行いました。その結果、設置されていた要救助者を模擬したダミーを発見することに成功しました。 また、倒壊家屋実験施設では現役消防隊員によるボランティ ア部隊IRS-Uによる様々なレスキューロボットのデモ体験・試 験も行いました。その際、能動スコープカメラは現場での導 入の可能性が最も高いと隊員から評価されました。 その後改良を加えた結果、2007年6月に米国FEMA訓練所 Disaster Cityで開催されたレスキューロボット評価会では、 試験を行った数十種類のロボットの中で、最も実用性が高い 2つのロボットのうちの1つに選ばれました。 2008年1月の米国Jacksonvilleの建築物倒壊現場におい ては事故原因の調査に用いられました。調査では瓦礫内に最 大深さ7mまで挿入することができ、コンクリート構造物の割 れ目の形状や方向、破片の形状や断面、建設用支柱の立て方 といった構造情報などを収集することができました。これら は、従来のスコープカメラや他のロボット等では進入不可能 な場所から得られた情報であり、能動スコープカメラの優位 性が示されました。また、この調査で「この成果は明らかに倒 壊建築物における救助での有効性を示しており、配備が期待 される」との評価を受けました。 現在は国内の消防や米国のロボット支援救助センター (CRASAR)等に貸出を行い、試験評価中です。


新潟中越沖地震倒壊家屋での検索試験
今後の見通し
現在の能動スコープカメラは推進可能な傾斜角度や段差高 さに限界があります。実際のレスキュー活動においては広範 囲を探索する必要があるため、それらの限界以上の環境も走 破することが求められます。そのために、製作した能動スコー プカメラの走行性能を国内外の消防士の方やレスキュー隊と 共同して評価し、その際の意見をもとに改良、新たな機能の 追加等を行って更なる性能向上を目指します。