

ロボット用3次元ビジョンセンサ 「TVSシリーズ」
[株式会社三次元メディア]

概要
バラ積みピッキングやアライメント(位置合わせ)用途の3次元ビジョンセンサ。各メーカーのロボットに接続可能なインタフェースや連携プログラムを用意しており、導入が容易である。
評価のポイント
ニーズが高いバラ積みピッキングに適した3次元ビジョンセンサとして開発され、複数メーカーのロボットに対応可能である点が評価された。今後、同センサの利活用の実績が広がるものと期待される。
世界初!!本格的3次元ロボットビジョンセンサ
ロボットビジョン市場
ロボットは多数の技術の集大成である特徴をもちますが、その 中で最も遅れているのはセンシング技術です。ロボットは3次元空 間の中で動作するため、3次元センシングを必要とします。特に3次 元ビジョン技術による位置決めは、非接触・高精度・低コスト・軽量・高 速などの特徴をもつため、強く期待されています。しかし、従来は技 術開発が遅れていたため、産業用ロボットは3次元ビジョンセンサ を搭載していないのが現状であり、あらかじめ、ティーチングで決 められた動きしかできず、掴むものは決まった場所に置かれていな ければなりません。3次 元センシングが実用化 できれば、産業用ロボッ トの応用が広がり新た な市場を創造すること になります。

TVSシリーズ 分離型
ユーザ観点からの特徴
当社は以前から独自開発により、高速高精度キャリブレーション 技術、高速高精度3次元計測技術、高速高精度3次元物体認識技術 を確立し、ライブラリとしても提供を続けてきました。しかし、ライブラリを用いたロボットビジョンシステムの構築には、カメラ選定や設 置方法などの光学設計、ライブラリを用いたプログラミング、認識 結果の解析によるロボットへのワーク把持位置姿勢の提示、などの 課題がありました。これをすべてユーザやロボットエンジニアが解 決することは難しく、3次元ビジョン実用化の大きな壁となっていま した。そこで当社は、従来の「ライブラリ」ではなく「センサ」の位置 付けでよりユーザインタフェイスの充実した製品の提供を目指し、 世界初の本格的3次元ロボットビジョンセンサTVSを開発し、 2011年3月より販売を 開始しました。TVSはパ ラメータの設定だけで 運用が可能であるため、 上記難題から解放され、 3次元ロボットビジョン システムで比較的容易 にラインの構築をするこ とが可能になりました。
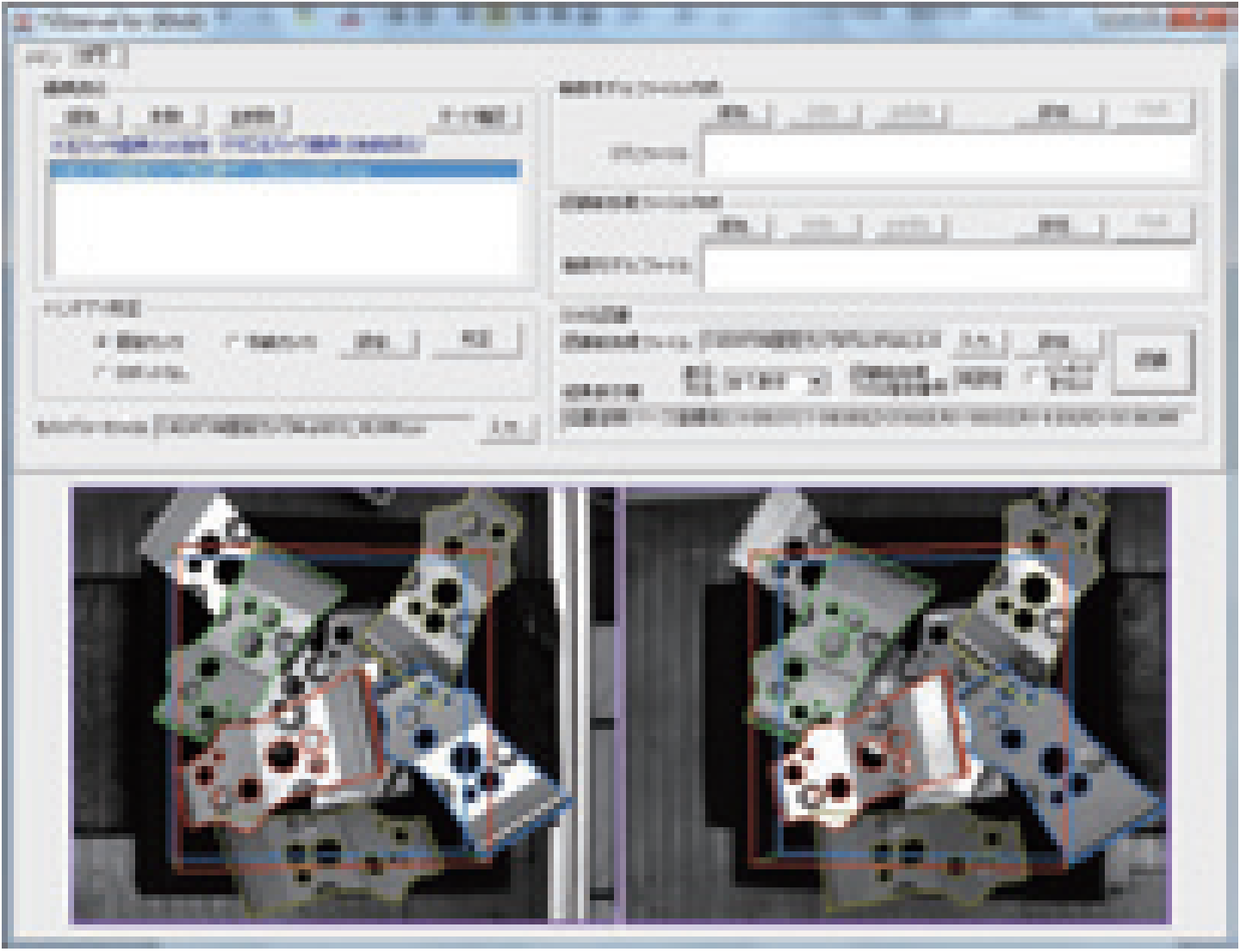
TVSの設定画面
システム構成と簡単ロボット連携
TVSシリーズは、専用ステレオカメラ、専用PC、専用PC上で作動するセンサプログラム、ロボットコントローラの連携プログラムで 構成されます。 まず、専用ステレオカメラには、ロボットハンドに取り付けるため の一体型と、固定カメラとして使用するための分離型との2種類が あり、それぞれの特長をもち、ラインの特性に合わせて選択するこ とが可能です。次に、TVSのソフトウェアには、当社独自開発による 高速高精度キャリブレーションと高速高精度任意形状3次元物体 認識が含まれています。キャリブレーションは、ロボットペンダント を使用した簡単なティーチング操作で、ロボットと専用ステレオカメ ラとの位置関係を高精度に算出します。3次元物体認識では、バラ 積みワークの中からピッキング可能なワークの把持位置姿勢を1 秒程度で認識します。また、対象ワークに円や直線等の幾何学模様 を必要としないため、任意形状(STL形式で入力)のワークの3次 元認識が可能です。最後に、ロボットコントローラの連携プログラム は、ユーザが既存のティーチング技術でTVSシリーズを扱うために は必須のツールであり、現在、デンソー、三菱電機、川崎重工業、安川電機、ABB、不二越のロボットに対応しており、今後もロボットメ ーカの拡張を進めることをユーザは望んでいます。
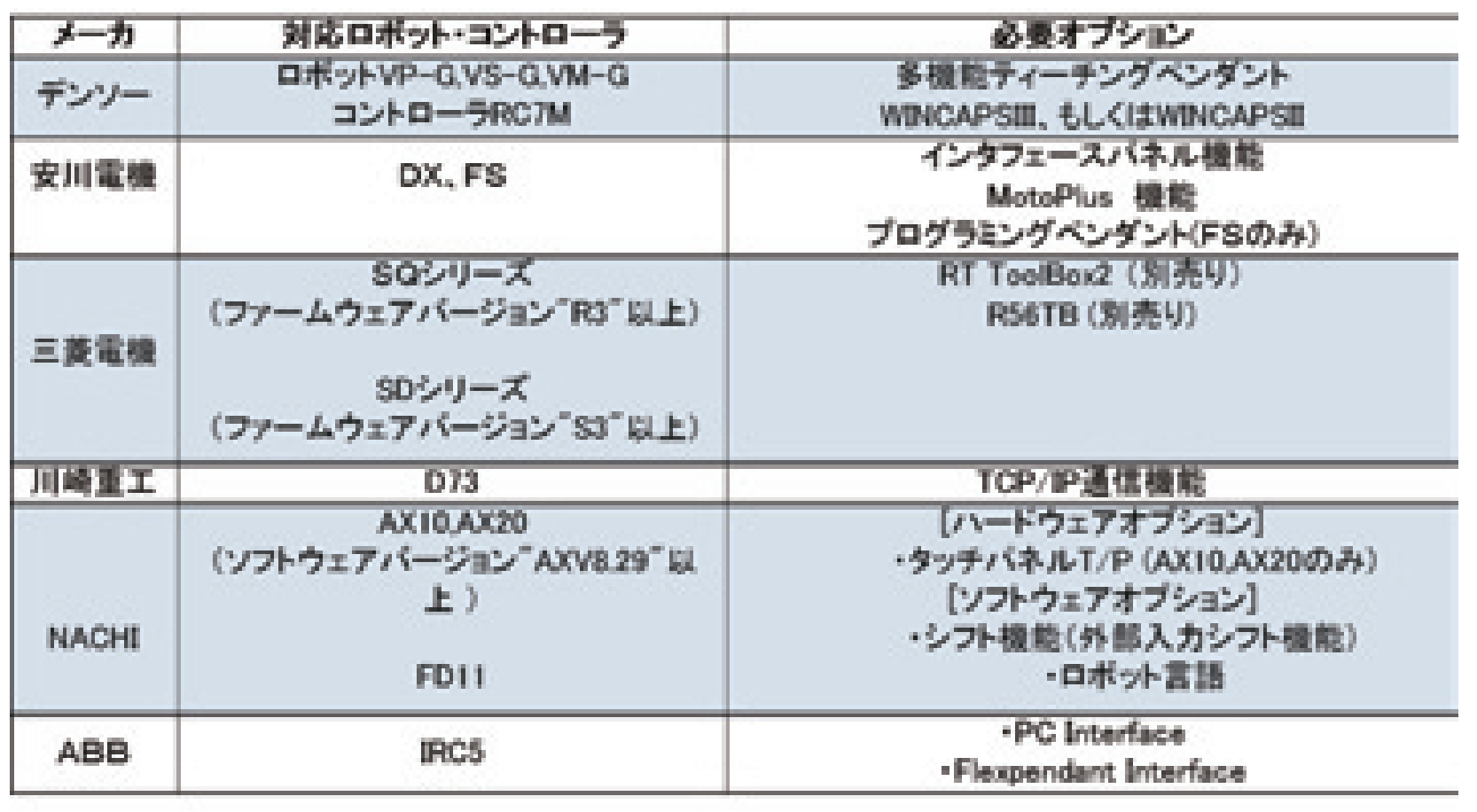
ロボット連携対応一覧
運用実績/今後の計画/最後に
今までの生産ラインへの部品供給は、技術的側面からどうして も「人」もしくは「人とパーツフィーダ」などの部品整列機など専用 機の用意が必要でした。人の場合は、繁忙期に備えてある一定以 上の熟練者を確保しなければならないというリスクや、熟練工員の 高齢化が課題となっているのはどの業界でも当てはまります。また、 部品整列機の場合は、部品ごとに製作しなければばらないという費 用の問題、段取り替えにはやはり人がそれなりに時間を割いて対 応しなければいけないという時間の問題、装置が大きくなるのでど うしても設置場所を確保しなければいけない、あるいは設置してい ない装置の保管が必要であるという場所の問題、運用で音がうる さくなるという環境の問題があります。これらの課題事項は専用機ではなく汎用機になる、「TVSとロボットを連携させた3次元ビジョ ンロボットシステムの導入」により解決されます。 ①人作業からロボットへの自動化による安定性や費用対効果 ②生産ラインの稼働時間延長 ③人確保のリスク低減 ④パーツ フィーダなどの部品を自動的に整列させ供給する装置が不要 ⑤ ロボットとの連携により専用機ではなく汎用機となることによる投 資リスクの低さなど、多くのメリットが生まれます。ユーザからは① 費用対効果を明確に提案できる3 次元ロボットビジョンシステムが 構築できた。②ロボットメーカの選定が自由で、システムの特性や 自社のロボット制御ノウハウでロボットを選択できるのがよかった。 ③ペンダントでも操作できるため、3次元認識がティーチングとパ ラメータの選択だけで簡単に設定できた。④次のライン設計のア イデア検討が楽しい。などの評価を頂いています。
コア技術の改良、機能面のさらなる向上のバージョンアップを 10月末にリリースします。来年には次機種の発売も予定しており、 市場からの御要望にお応えすることが当社の責務であり、社会へ の貢献だと考えています。
①現在、6社のロボットと連携 ②パラメータの設定だけで3次元認識が簡単にできる ③すでに導入実績があり、実ラインで稼働している3次元ロボットビジョンはすでに、夢から現実になっています。これまで3次元ビジョンシステムの検討をあきらめていた分野での再検討を期待します。
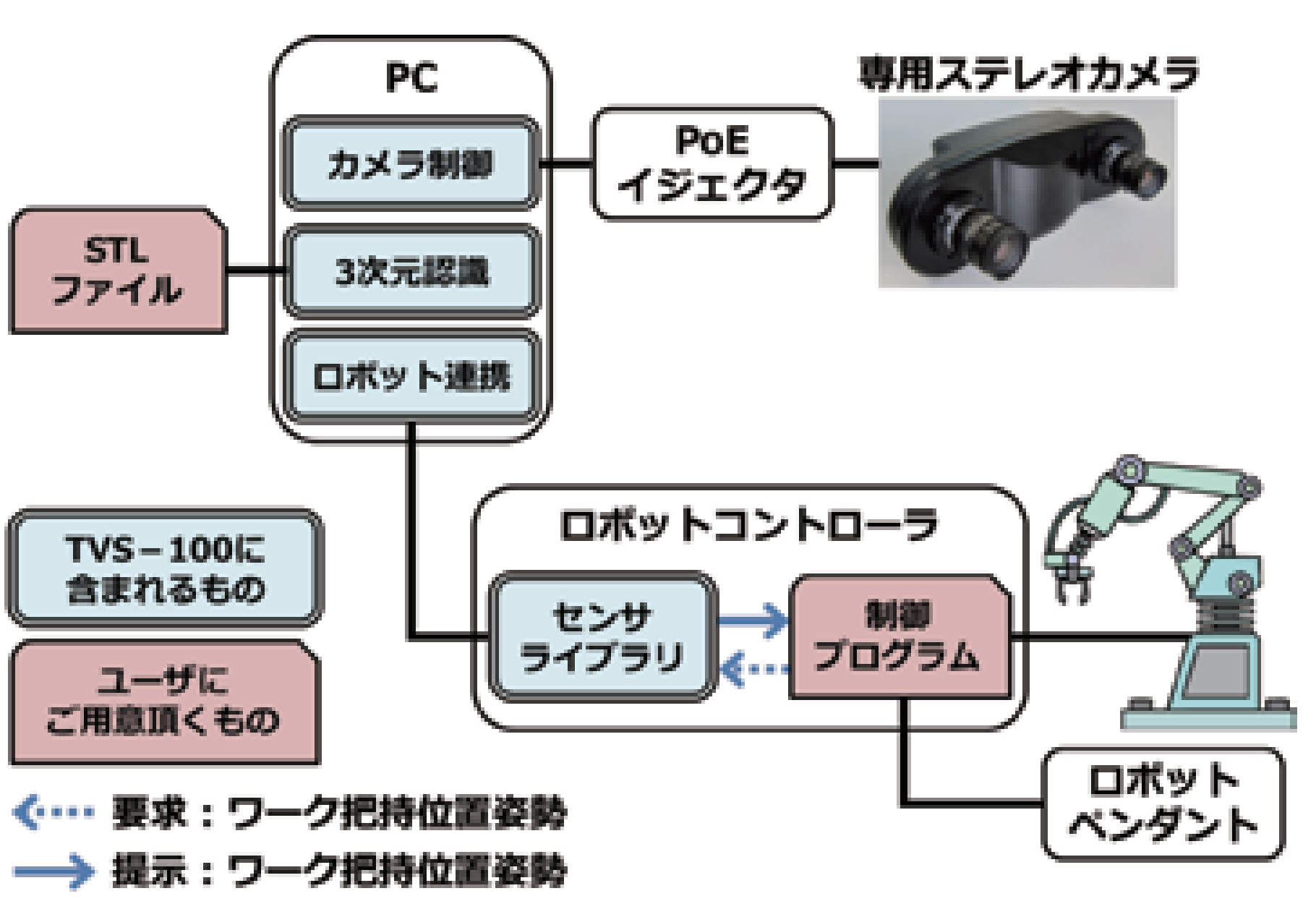
システム構成図