モジュール型高速多機能装着機 NXTⅢ
[富士機械製造株式会社]

概要
評価のポイント
電子回路基板への電子部品実装及びその周辺プロセスのインラインコントロール
「NXTⅢ」の開発
スマートフォン等の通信端末やカーエレクトロニクス製品は、多機 能化、高性能化に伴う部品点数の増加、小型部品の高密度実装が急 速に進んでいます。その反面複雑な回路を保護するためのシールド 部品や挟ピッチリードや極小バンプなどのパッケージ部品実装も必 要となり、装着機に求められる機能は年々高まってきています。「NXTⅢ」はそれらの要望に応えるべく高い生産性と品質の確保、 0201部品(0.25mm x 0.125mm)などの次世代部品の実装も 視野に入れて開発を行いました。
高い生産性と高い品質のために
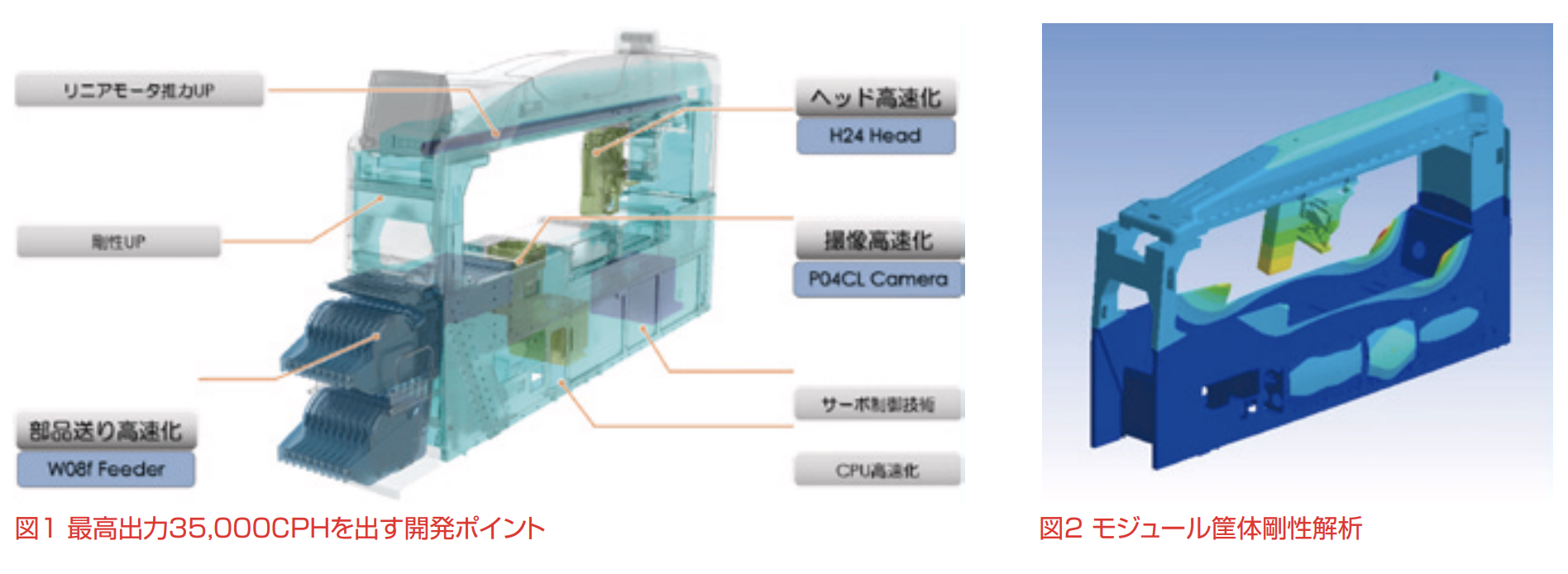
高い生産性と高い品質は装置の土台となる筐体の剛性及び駆動ロボットの剛性と動作方法に大きく依存します。そのため、まずサーボ制御系の機能向上を行いました。サーボモーターを今まで より早く正確にコントロールするために、CPUのスペックアップに よる応答性の向上や制御アルゴリズムの開発を行い、より高速で 正確な位置決めを行うことが可能となりました。 次にXYロボットのスライド軸及び筐体の剛性向上とリニアモー ターの効率アップを行いました。スライド軸に関しては、構造解析 で最も効率の良い材質及び形状を求めました。今までよりも軽量 化しつつ、3方向に発生する加速度に対し、変形量を大きく抑える ことが可能な理想的な形状を見出しました(図1参照)。また筐体に 関しても現行機よりも高加速度でロボットが駆動するので、その加 速度に負けない剛性を得るために、構造解析(図2参照)を繰り返し行い、新たにモノコックに近い構造を用いることで、ロボットの加速度に耐える筐体を開発することができました。
「0201」部品を標準対応可能とした新型超高速H24ヘッド 及び周辺開発
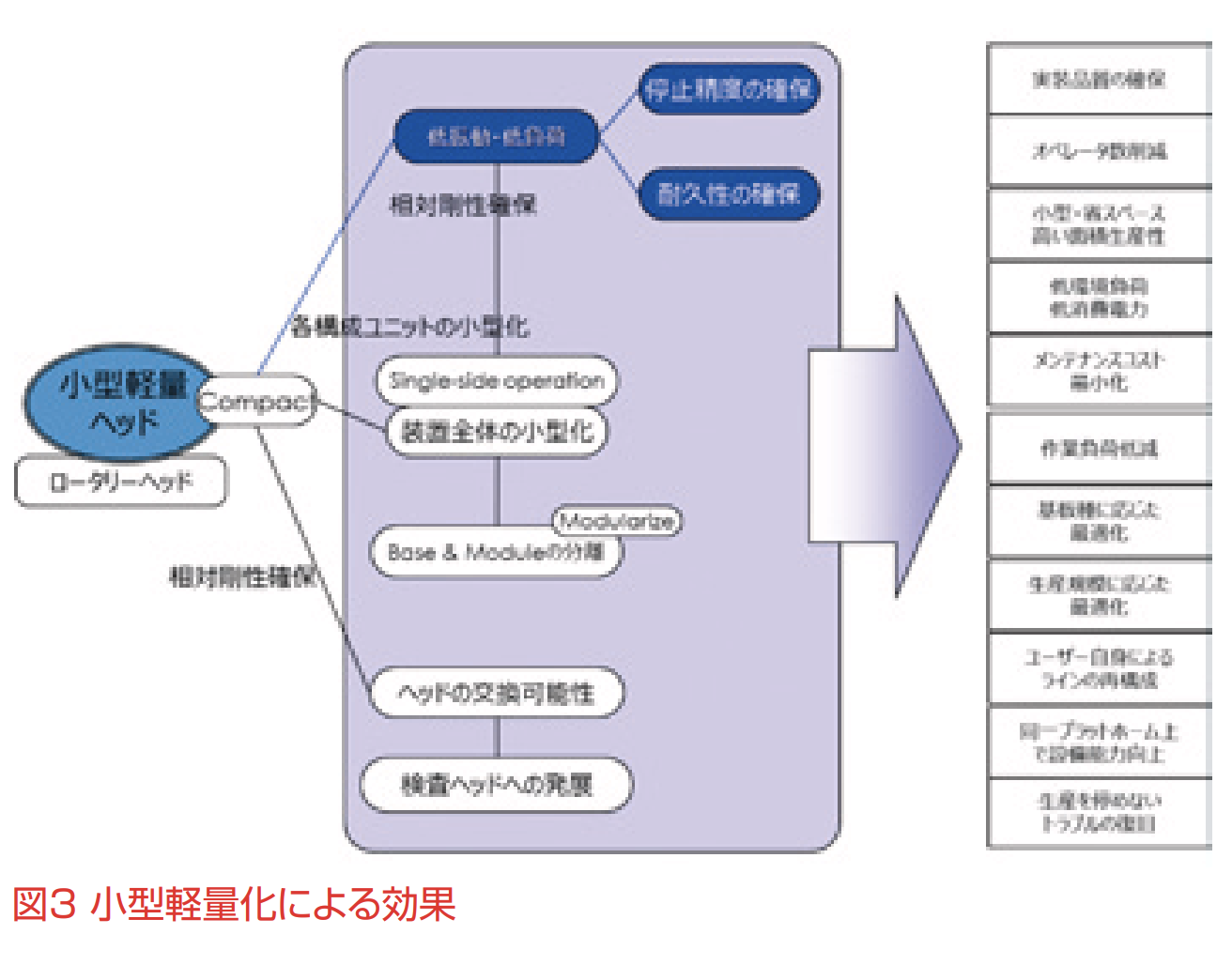
極小部品の高速且つ高精度な吸着・装着を実現するためには実 装ヘッドの小型化・軽量化が不可欠です。これにより装置の小型化 と高面積生産性を実現することもできます。(図3参照)
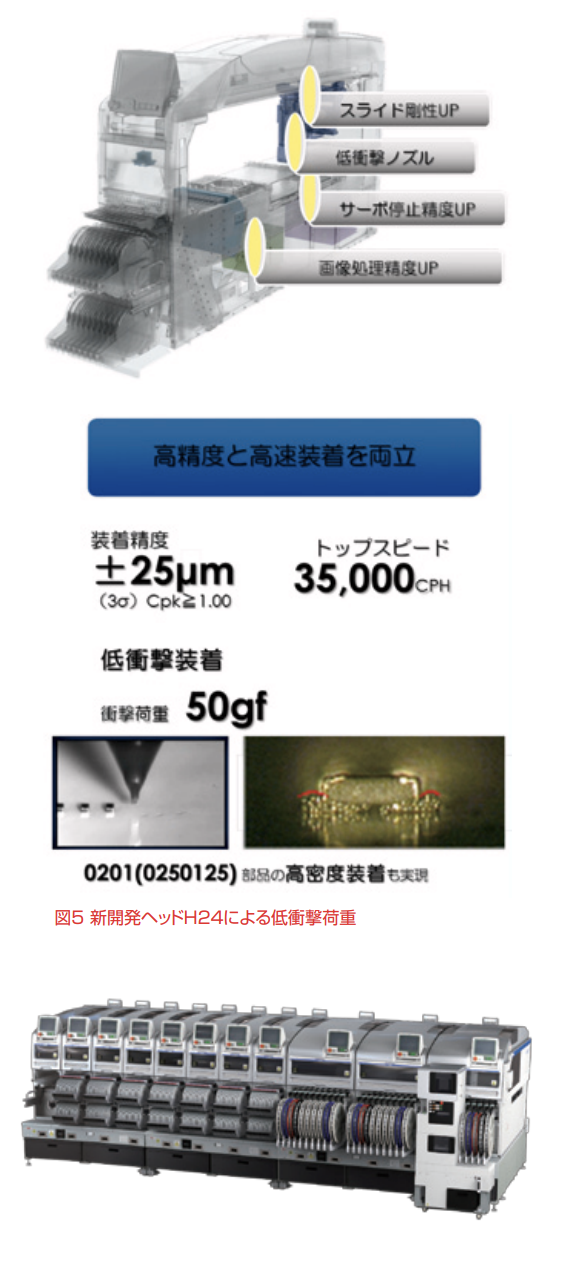
新開発ヘッドH24を「NXTⅢ」に搭載 することで最速35,000CPH(一時間あ たり部品装着点数)を達成し、前モデルと 比べ約35%のCPHの向上を実現して います。 先述した「NXTⅢ」の高剛性の装置構 造に加え独自の新開発リニアモータとサ ーボ制御アルゴリズム採用によりこのヘ ッドの能力は向上。ヘッド筐体は高い剛性 を確保し従来ヘッド「V12」と比較して、 約30%の軽量化に成功したヘッドは、24本並んだ吸着ノズルを高 速でより正確に駆動させるために、ヘッドの各軸が正確に同期して 駆動できる。このことにより次世代部品である「0201」をマシンの スペックを落とすことなく、最高速35,000CPHで装着可能としま した。 さらに次世代極小部品の採用は実装の高密度化が要求される。 そのため高い生産性を確保しながらも高い装着精度が要求されま す。この実現には新たに開発した「フライングビジョンシステム」が 大きく寄与しています。従来の画像取得方法はカメラの上で装着 ロボットに搭載されたヘッドが一旦停止してパーツを撮像していま したが、「フライングビジョンシステム」ではカメラ上を装着ヘッドが 高速で走りぬけながら撮像(ノンストップ撮像)することが可能とな り、装着精度±25μmでCPHの向上を実現しました。最後に、装着される部品が小さくなればなるほど、部品自体が脆 くなる傾向にあります。そのため装着時の耐衝撃荷重を軽減させ る必要がありますが、装着ヘッドH24の軽量化とともに新規開発さ れた超小型軽量ノズルの搭載により、装着時の動的荷重を0.5N 以下という低衝撃装着を実現しています。(図5参照)