

モジュール分散協働型収穫支援ロボットシステム(自走式イチゴ収穫ロボット)
[国立大学法人宇都宮大学(尾崎功一研究室)/アイ・イート株式会社]
概要
色を相対識別する手法により、イチゴの熟度及び茎の切断位置を正確に認識し、果実に触れずに収穫できるため、イチゴの商品価値を損なわずに販売することができる。 また、複数モジュールの組合せによるロボットシステムで、分散化した機能モジュールを後から追加する等、段階的なロボット導入が可能となる。
評価のポイント
自走式ロボットの要素機能をモジュール分散化し、各モジュールが協働動作するロボットシステムは技術的にもユニークであり、完熟イチゴを傷めることなく収穫できるため海外輸出が可能になるなど、生産者にとってメリットが多い点を評価。
協働によるイチゴ収穫の生産支援
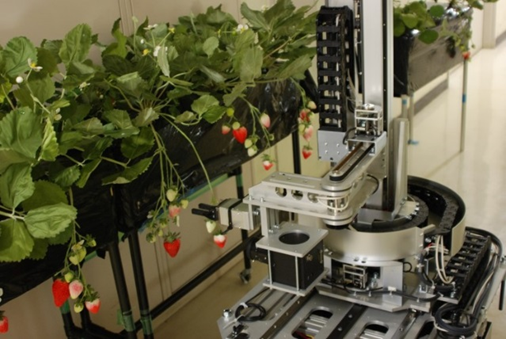
農産物の高品質生産を実現する収穫支援ロボット
日本の農業は世界的に見ても高品質であり、安心して食べること ができます。そのため、生産ノウハウの詰まった今ある栽培ハウス に導入できるような作業補助・収穫を実現するロボットが強く望まれ ています。さらに、ロボットによる省力化だけではなく、ロボット導入 による品質の保証など、ロボット導入は日本産農産物としてのブラ ンディングにも効果的です。我々は、大粒完熟イチゴを最高級農産 物として海外への出荷を実現しましたが、このポイントは実にまったく触れない状態で最高のイチゴを消費者まで届けることでした。実 に触れない作業は生産者にとっては負担の高い作業ですが、それを支援するロボットを目指しました。
必要な機能を分散化し協働システムとして再構築
我々は、自走式イチゴ収穫ロボットを試作し、実際の栽培ハウス で実証試験を重ねてきました。生産者の生の声を聞きながら、現場の実情と求められるロボットの役割を知ることができました。それは、 必ずしも全ての機能が求められていないということ。そこで生産者 のニーズに合わせてロボットを段階的に導入すること、すなわち、 1台のロボットに全ての機能を搭載するのではなく、必要な機能を 分散させて、生産者とロボットあるいはロボットどうしで協働するよう なシステムを考えました。それが移動ロボットをコアとしたモジュー ル分散協働型ロボットシステムです。現在、移動モジュール、観察モ ジュールそして収穫モジュールがあります。 移動モジュールには、つくばチャレンジで培われた宇都宮大学 独自の自律移動機能が実装され、栽培ハウス内での自律移動や、 人追従移動が可能です。飛躍的な小型化を実現したため、一般的 な栽培ハウスに投入できます。ロボット導入初期段階では、汎用搬 送カゴやイチゴフォルダを接続して、搬送作業を自動化することが できます。イチゴフォルダは、完熟大粒イチゴを欧州まで輸送でき る唯一の容器「フレシェル®」とも連動可能で、イチゴのブランディングに貢献します。 観察モジュールは、イチゴの熟度を判定し、収穫対象のイチゴの位 置を特定します。収穫モジュールは、イチゴとその枝を認識し、実に 触れずにイチゴを収穫します。これらのモジュールのポイントはイチ ゴや茎などの認識ですが、人視覚に基づいた色座標により、比較的ロ バストに色を識別し、イチゴの状態を判断することができます。

生産者と協働して搬送する移動モジュール
今後の展開
栃木県産学官コンソーシアム事業(2004-05)、農林水産業の新 たな農林水産政策を推進する実用技術開発事業(2009-12)及び ロボット技術開発実証事業(2015)、文部科学省の大学発新産業創 出拠点プロジェクト(2013-14)等から支援を受けました。今後は大学発ベンチャー「アイ・イート(株)」はじめ、協力機関等と連携し、 より先端的なロボットへと発展させます。