

耐切創性式の柔剛切替グリッパ機構 「Omni-Gripper」
[国立大学法人 東北大学(田所・昆陽・多田隈 研究室)]
概要
袋自体に柔剛切替機性を持たせるために、袋膜間に粉体を充填して三層構造とすることで、粉体充填量を少なくし、それにより高い柔軟性を特徴とする新たなグリッパ機構。 従来の袋型グリッパと比べて低い押付力でも対象物形状へのなじみ性が高く、さらに素材の工夫により耐切創性を保有するため鋭利な対象物でも袋が破けることなく把持することが可能。
評価のポイント
瓦礫群が存在する災害等での現場ニーズに対応した技術となっており実用的である点に加え、グリッパの機構だけでなく素材やグリッパの製造面に至るまで総合的に検討がなされるなど独自性が高く、学内でのベンチャービジネス支援プログラムにも採択されるなど、今後の事業展開が期待される点を高く評価。
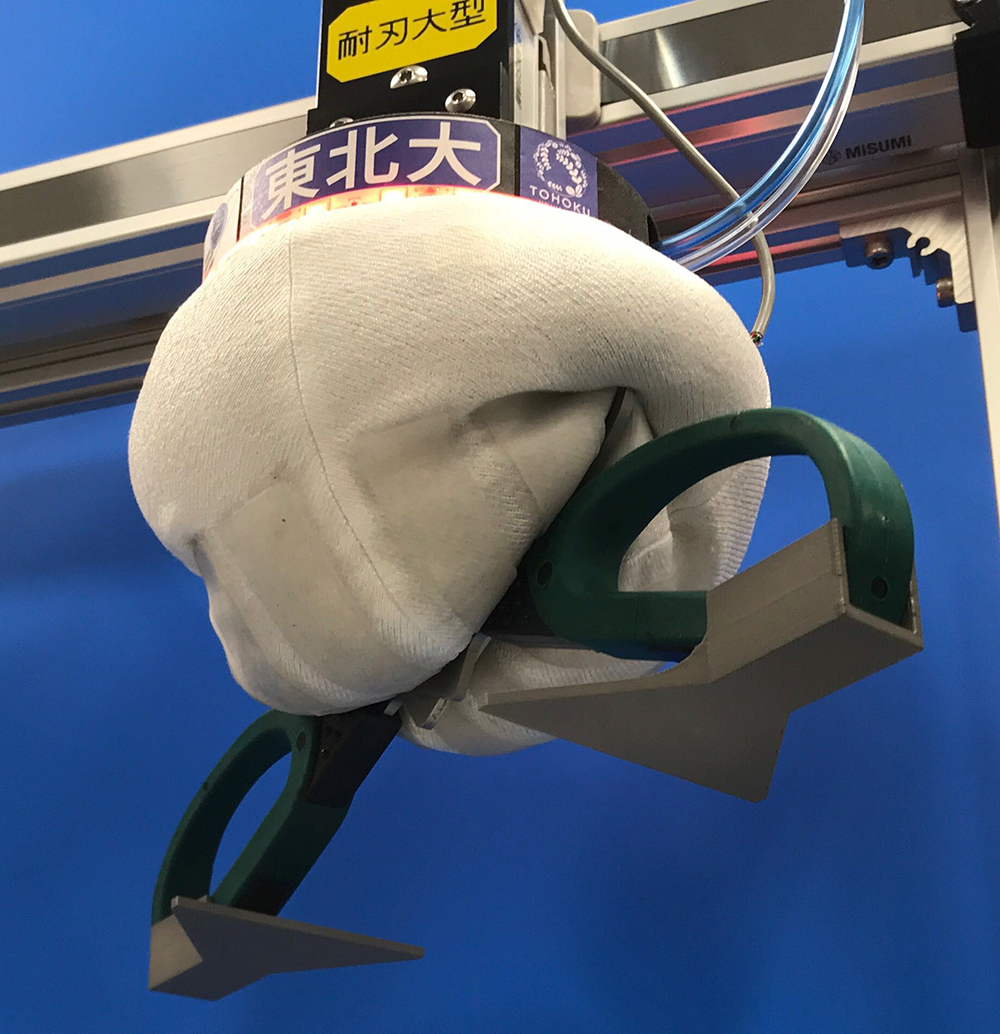
刃物のようにとがった物体でもつかめる柔剛切替グリッパ機構
低押付力・大変形が可能な膜袋構造
本研究チームでは、形や大きさがまちまちな物でもつかむことが できる膜袋型のロボットグリッパを開発しました。複数の指を持たず に多種多様な物体をつかむことを目指した袋構造において、我々の 研究チームでは、袋自体に柔剛切替機性を持たせるために、袋膜間 に粉体を充填して三層構造とすることで、粉体充填量を少なくし、 それにより高い柔軟性を実現しました。そのため、複雑な形状や脆 弱な物体の損傷を抑えた状態でつかむことが可能になります。この 性能は、工場の生産現場でも有効であり、多品種少量生産で必要な 多くの種類の複雑形状の部品をつかみ、組み立てや搬送作業への 適用が期待されています。部品に応じてグリッパを交換する必要が なく、そのままでさまざまな部品に対応できるからです。 しかし、従来の袋型グリッパはとがった対象物をつかむ際に破れる 問題がありました。そのため、災害時の現場で、破損バルブの開閉や 瓦礫内のガラスの破片、鉄筋の露出した鉄筋コンクリートなどをつか むことはできず、対象物に合わせてグリッパを別のものに付け替える 必要がありました。
鋭利な対象物でも把持可能な耐切創性
本研究チームでは、瓦礫でも破けない高い耐切創性を持つ袋 型ロボットグリッパの実現を目指しました。これまでのゴム膜を使 用する方法に対して、伸縮性のある防刃生地を使うというアイディ アを考案し、柔軟性を保ちながら優れた耐切創性を実現しました。 防刃生地を先端が半球形状となる袋状にし、その表面に滑り止め 用のシリコンゴムを塗布した構造の耐切創性カバーを構成しまし た。柔軟性を維持できる袋の形状、および袋表面へのゴム塗布の パターンと方法が、今回技術的にも非常に困難だったポイントで す。これにより、するどくとがったものに接触したり、刃物で切りつ けたりしても袋が破損しない、従来に無い極めて高い耐切創性を 持つロボットグリッパの実現が可能となりました。
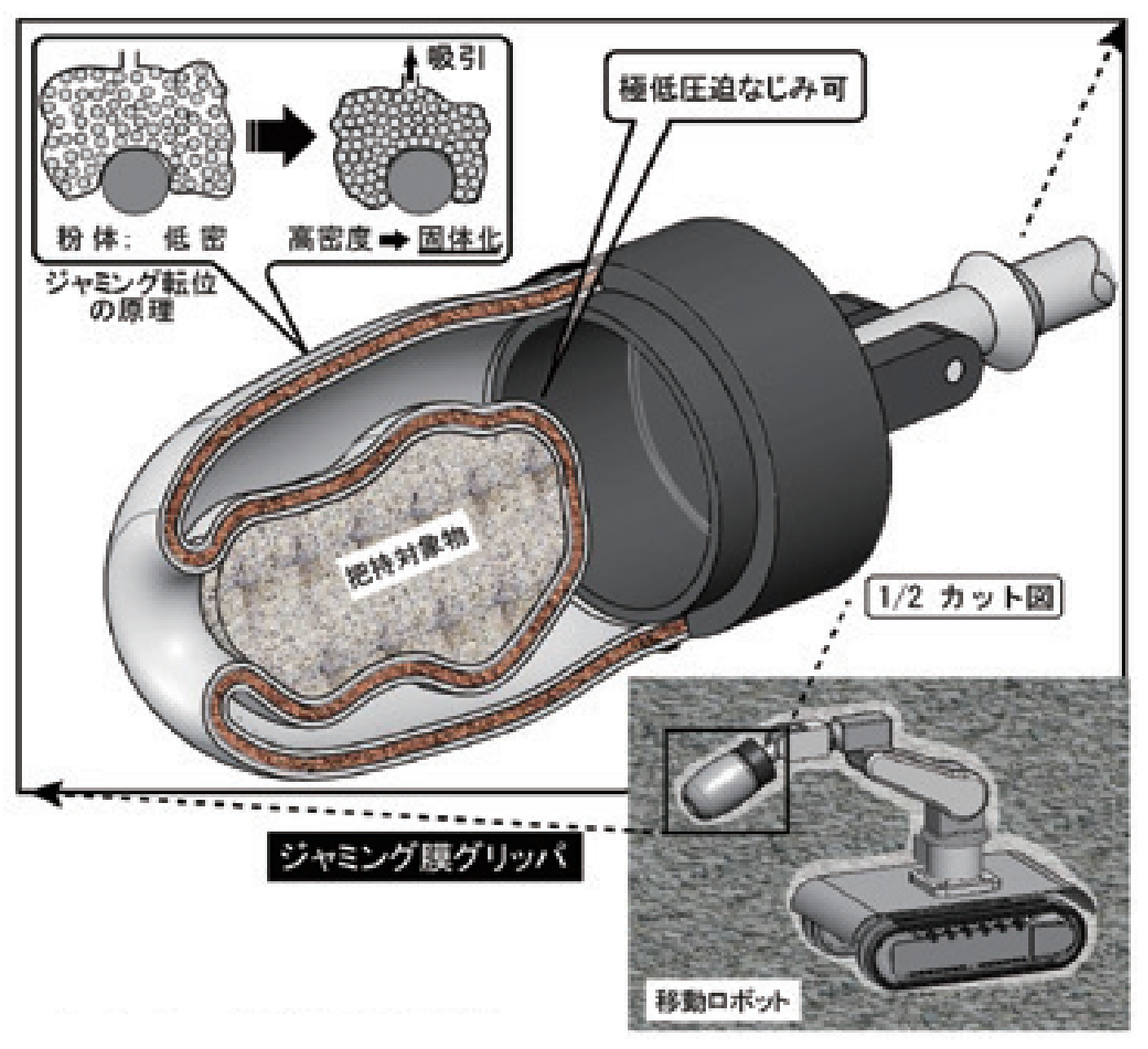
低押付力・大変形を可能にするジャミング膜グリッパ機構の内部構造
把持対象例として、破損バルブにおいて、従来では柔軟なゴム膜 がバルブのとがった部分に接触し破けてしまっていましたが、今回 開発した方式では破けることなく開閉作業が行えることを実験を通 して確認しました。以上のように、このロボットグリッパを用いれば、 現場での破損したバルブや不定形な割れたガラス類、建築用で飛 び出た釘類や鉄条網などの、従来不可能であったとがった・不定形・ 脆弱軟弱な対象物をつかむことが可能となるものです。また、グリッ パを移動体に搭載し、高い剛性が求められるボタン押し、低押付力 が必要となるグリッパル把持、そして配電盤開けを実現しました。 このような耐切創性・耐久性の向上は、災害現場はもとより、工場 における生産現場における柔軟ロボットグリッパの実用性を飛躍的 に高めるものであり、今後の広い活用が見込まれます。