

小惑星探査機はやぶさ2/小惑星探査ロボットMINERVA-II
[国立研究開発法人宇宙航空研究開発機構 はやぶさ2プロジェクトチーム/MINERVA-Ⅱプロジェクトチーム]
概要
2014年に打ち上げられた小惑星探査機はやぶさ2は、2018年6月に小惑星リュウグウへ到着し、約1年半の滞在期間を通して、観測や試料回収を行った。未踏天体探査ならではの不確定性と、片道20分程度かかる遠距離通信、地上を介した異常検知と緊急離脱が間に合わない深宇宙という極限環境下で、現場で探査機自身が判断を下し、タッチダウンまでのシーケンスを可能とした。同機に搭載されていたMINERVA-IIは、微小重力天体における最適な移動方法として新しいホッピング機構を採用し、完全自律で小惑星表面の観測を行った。
評価のポイント
はやぶさ2は極限環境下での自律移動を実現したロボティクス技術であり、様々なバックアップ、パラメータ調整機能、地上シミュレーションを備えたシステムである点を評価。MINERVA-IIは極めて重力の低い環境で、ホッピングという発想で小惑星表面の観測を実現した点を評価した。どちらも科学技術の発展に大きく貢献するものであり世界に誇る技術といえる。関連事業のさらなる挑戦を期待する。
深宇宙からのサンプルリターンミッション
世界に先駆けた深宇宙探査ロボティクス技術
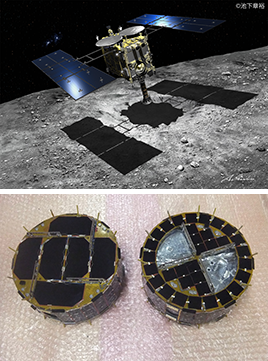
宇宙空間では、一般に、人間が直接手を出すことが出来ない領域 にいることから、失敗を繰り返しながら、トライアンドエラー的に成 功に向けて物事を進めていくというやり方が出来ず、探査機の機能 には非常に高い信頼性が求められます。一方、前人未踏の領域にお いて、手探りの調査が求められる深宇宙探査という分野では、高い信頼性を確保しながらこの挑戦的な探査を行う、という本質的に相 反する思想を組み合わせて遂行する必要があります。このような特 殊環境において、はやぶさ2では、地上からの指令をベースに制御 を行うHuman in the Loopの方式と、イベントドリブンの制御 シーケンス機能や、ターゲットマーカのような人工的な特徴点を駆使する 探査機の自律機能に頼った制御方式を適切に組み合わせることにより、到着後に初めて明らかになった未知環境に柔軟に対応しつつ、一定の信頼性を確保しながら、2回のタッチダウ ンによるサンプル採取を遂行することに成功しました。
はやぶさ2がターゲットマーカを追尾する様子
小型軽量な自律探査ロボットMINERVA-Ⅱ
MINERVA-Ⅱは、はやぶさ2に搭載された双子のロボットであり、 大きさ1km弱の小惑星リュウグウの表面を移動探査することを目 的としています。 大きさは直径18cm、高さ7cm(突起物除く)、1台あたりの質量 が1.1kg強と非常に小型・軽量です。ロボットは表面に貼られた太 陽電池セルで得られた電力により動作します。ロボットは、小惑星表 面の非常に小さい重力環境(地球と比較すると10万分1程度)を ホップにより移動するための機構、カメラ、センサ、無線機を備えて います。小惑星と地球の間には大きな時間遅れ(往復約40分)があったた め、ロボット搭載ソフトウェアには、地球からの指令なしに完全に自 律的に動作するアルゴリズムが実装されています。
世界初の小天体表面移動探査ロボット
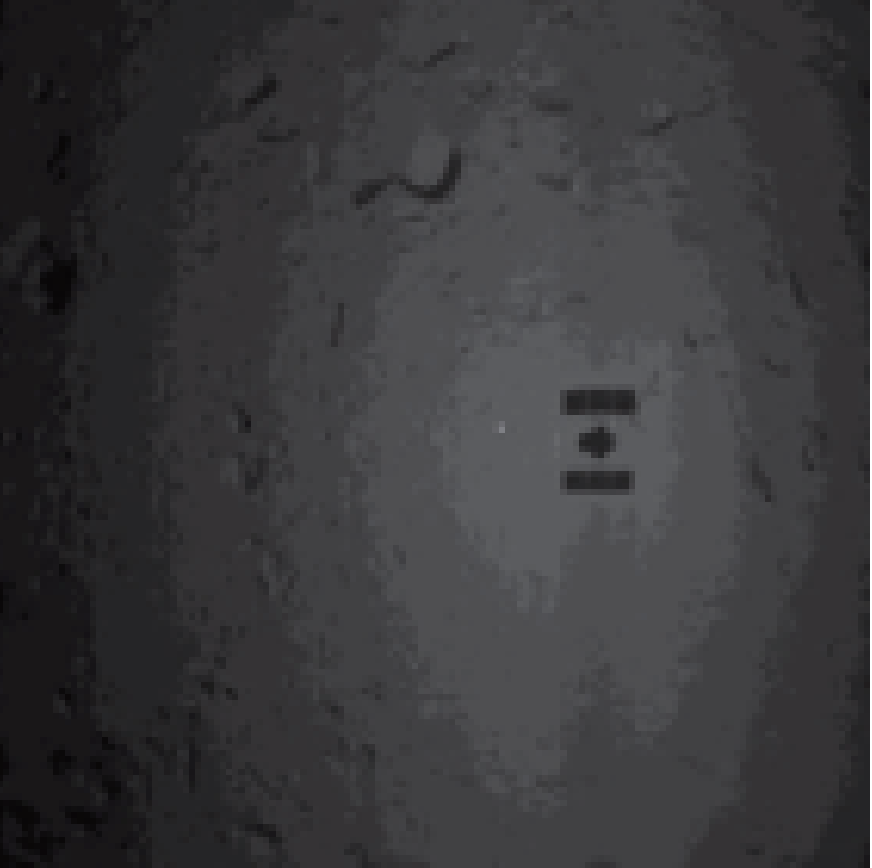
2台のロボットは2018年9月21日に母船から小惑星に向けて 投下されました。ローバ1Aは2018年10月26日までの113小惑星日(地球では約35日)間、小惑星表面の多地点での観測を行ない、合計609枚の小惑星表面画像を地球に送りました。この間、小 惑星表面を約1/4周しています。 ローバ1Bの活動期間は2018年9月24日までの10小惑星日 で、39枚の画像が得られました。 これらの実績により世界で初めて太陽系の小天体表面を移動探査するという快挙を成し遂げ ました。我が国にとっても地球外天体の表面を直接探査した初のロボットです。

MINERVA-Ⅱが撮影した画像の1枚
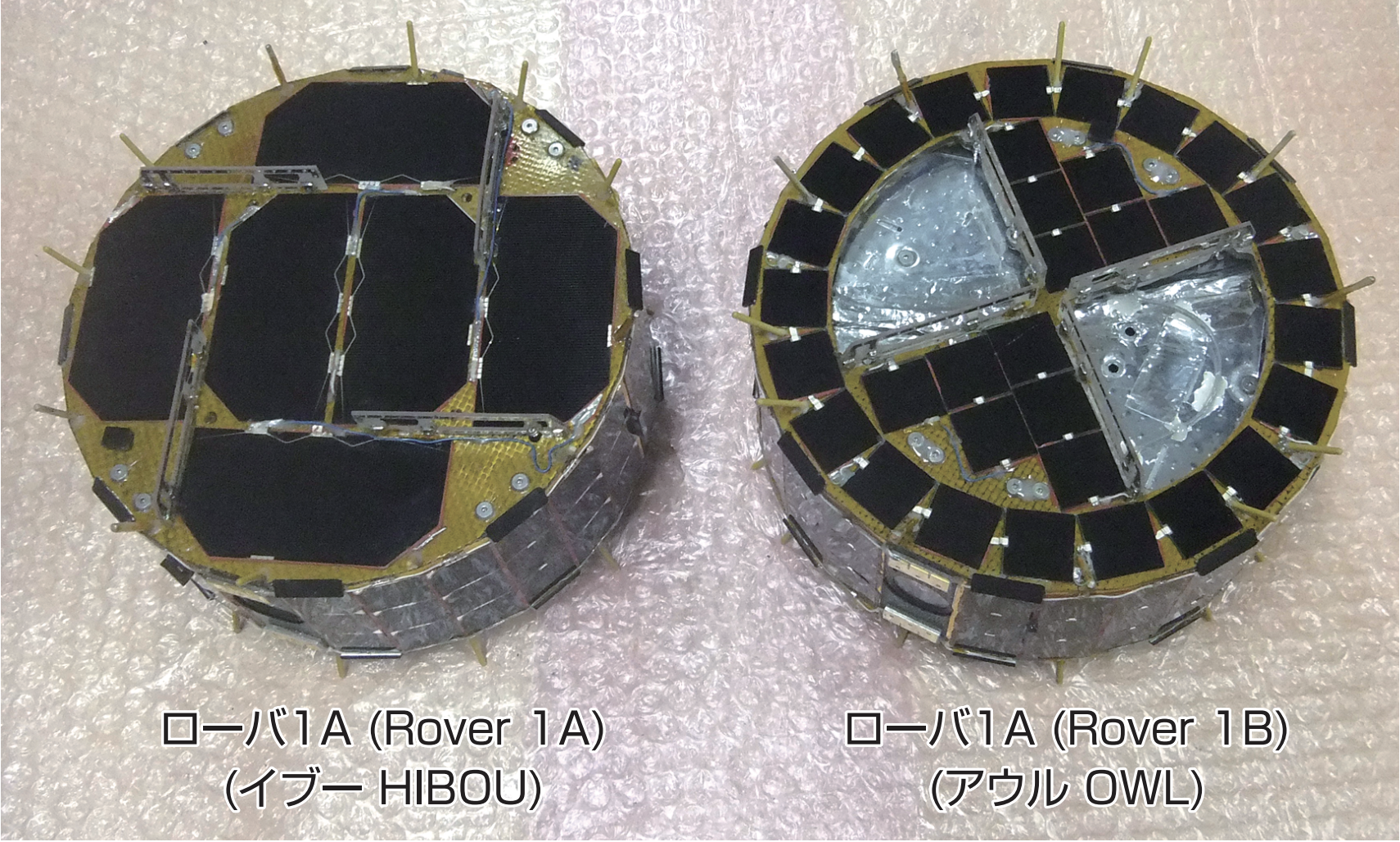
MINERVA-Ⅱの2台のロボット